
File size: 9,281 Bytes
9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce 9dfcec7 d5bd4ce |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 |
---
library_name: transformers
license: apache-2.0
language:
- en
pipeline_tag: object-detection
tags:
- object-detection
- vision
datasets:
- coco
widget:
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/savanna.jpg
example_title: Savanna
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/football-match.jpg
example_title: Football Match
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/airport.jpg
example_title: Airport
---
# Model Card for Model ID
<!-- Provide a quick summary of what the model is/does. -->
## Model Details
### Model Description
The YOLO series has become the most popular framework for real-time object detection due to its reasonable trade-off between speed and accuracy.
However, we observe that the speed and accuracy of YOLOs are negatively affected by the NMS.
Recently, end-to-end Transformer-based detectors (DETRs) have provided an alternative to eliminating NMS.
Nevertheless, the high computational cost limits their practicality and hinders them from fully exploiting the advantage of excluding NMS.
In this paper, we propose the Real-Time DEtection TRansformer (RT-DETR), the first real-time end-to-end object detector to our best knowledge that addresses the above dilemma.
We build RT-DETR in two steps, drawing on the advanced DETR:
first we focus on maintaining accuracy while improving speed, followed by maintaining speed while improving accuracy.
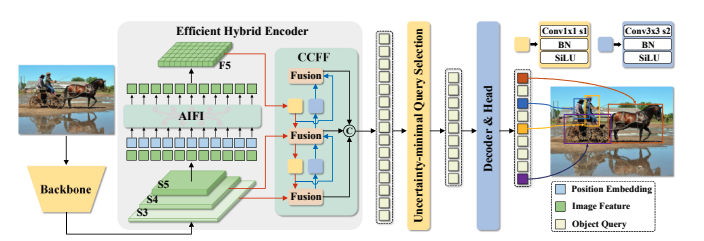
Specifically, we design an efficient hybrid encoder to expeditiously process multi-scale features by decoupling intra-scale interaction and cross-scale fusion to improve speed.
Then, we propose the uncertainty-minimal query selection to provide high-quality initial queries to the decoder, thereby improving accuracy.
In addition, RT-DETR supports flexible speed tuning by adjusting the number of decoder layers to adapt to various scenarios without retraining.
Our RT-DETR-R50 / R101 achieves 53.1% / 54.3% AP on COCO and 108 / 74 FPS on T4 GPU, outperforming previously advanced YOLOs in both speed and accuracy.
We also develop scaled RT-DETRs that outperform the lighter YOLO detectors (S and M models).
Furthermore, RT-DETR-R50 outperforms DINO-R50 by 2.2% AP in accuracy and about 21 times in FPS.
After pre-training with Objects365, RT-DETR-R50 / R101 achieves 55.3% / 56.2% AP. The project page: this [https URL](https://zhao-yian.github.io/RTDETR/).

This is the model card of a 🤗 transformers model that has been pushed on the Hub. This model card has been automatically generated.
- **Developed by:** Yian Zhao and Sangbum Choi
- **Funded by [optional]:** National Key R&D Program of China (No.2022ZD0118201), Natural Science Foundation of China (No.61972217, 32071459, 62176249, 62006133, 62271465),
and the Shenzhen Medical Research Funds in China (No.
B2302037).
- **Shared by [optional]:** Sangbum Choi
- **Model type:**
- **Language(s) (NLP):**
- **License:** Apache-2.0
- **Finetuned from model [optional]:**
### Model Sources [optional]
<!-- Provide the basic links for the model. -->
- **Repository:** https://github.com/lyuwenyu/RT-DETR
- **Paper [optional]:** https://arxiv.org/abs/2304.08069
- **Demo [optional]:** [More Information Needed]
## Uses
<!-- Address questions around how the model is intended to be used, including the foreseeable users of the model and those affected by the model. -->
### Direct Use
<!-- This section is for the model use without fine-tuning or plugging into a larger ecosystem/app. -->
You can use the raw model for object detection. See the [model hub](https://huggingface.co/models?search=rtdetr) to look for all available RTDETR models.
### Downstream Use [optional]
<!-- This section is for the model use when fine-tuned for a task, or when plugged into a larger ecosystem/app -->
### Out-of-Scope Use
<!-- This section addresses misuse, malicious use, and uses that the model will not work well for. -->
## Bias, Risks, and Limitations
<!-- This section is meant to convey both technical and sociotechnical limitations. -->
### Recommendations
<!-- This section is meant to convey recommendations with respect to the bias, risk, and technical limitations. -->
Users (both direct and downstream) should be made aware of the risks, biases and limitations of the model. More information needed for further recommendations.
## How to Get Started with the Model
Use the code below to get started with the model.
```
import torch
import requests
from PIL import Image
from transformers import RTDetrForObjectDetection, RTDetrImageProcessor
url = 'http://images.cocodataset.org/val2017/000000039769.jpg'
image = Image.open(requests.get(url, stream=True).raw)
image_processor = RTDetrImageProcessor.from_pretrained("PekingU/rtdetr_r18vd_coco_o365")
model = RTDetrForObjectDetection.from_pretrained("PekingU/rtdetr_r18vd_coco_o365")
inputs = image_processor(images=image, return_tensors="pt")
with torch.no_grad():
outputs = model(**inputs)
results = image_processor.post_process_object_detection(outputs, target_sizes=torch.tensor([image.size[::-1]]), threshold=0.3)
for result in results:
for score, label_id, box in zip(result["scores"], result["labels"], result["boxes"]):
score, label = score.item(), label_id.item()
box = [round(i, 2) for i in box.tolist()]
print(f"{model.config.id2label[label]}: {score:.2f} {box}")
```
## Training Details
### Training Data
<!-- This should link to a Dataset Card, perhaps with a short stub of information on what the training data is all about as well as documentation related to data pre-processing or additional filtering. -->
The RTDETR model was trained on [COCO 2017 object detection](https://cocodataset.org/#download), a dataset consisting of 118k/5k annotated images for training/validation respectively.
### Training Procedure
<!-- This relates heavily to the Technical Specifications. Content here should link to that section when it is relevant to the training procedure. -->
We conduct experiments on
COCO [20] and Objects365 [35], where RT-DETR is trained
on COCO train2017 and validated on COCO val2017
dataset. We report the standard COCO metrics, including
AP (averaged over uniformly sampled IoU thresholds ranging from 0.50-0.95 with a step size of 0.05), AP50, AP75, as
well as AP at different scales: APS, APM, APL.
#### Preprocessing [optional]
Images are resized/rescaled such that the shortest side is at 640 pixels.
#### Training Hyperparameters
- **Training regime:** <!--fp32, fp16 mixed precision, bf16 mixed precision, bf16 non-mixed precision, fp16 non-mixed precision, fp8 mixed precision -->

#### Speeds, Sizes, Times [optional]
<!-- This section provides information about throughput, start/end time, checkpoint size if relevant, etc. -->
## Evaluation
<!-- This section describes the evaluation protocols and provides the results. -->
This model achieves an AP (average precision) of 53.1 on COCO 2017 validation. For more details regarding evaluation results, we refer to table 2 of the original paper.
### Testing Data, Factors & Metrics
#### Testing Data
<!-- This should link to a Dataset Card if possible. -->
#### Factors
<!-- These are the things the evaluation is disaggregating by, e.g., subpopulations or domains. -->
#### Metrics
<!-- These are the evaluation metrics being used, ideally with a description of why. -->
### Results
#### Summary
## Model Examination [optional]
<!-- Relevant interpretability work for the model goes here -->
## Environmental Impact
<!-- Total emissions (in grams of CO2eq) and additional considerations, such as electricity usage, go here. Edit the suggested text below accordingly -->
Carbon emissions can be estimated using the [Machine Learning Impact calculator](https://mlco2.github.io/impact#compute) presented in [Lacoste et al. (2019)](https://arxiv.org/abs/1910.09700).
## Technical Specifications [optional]
### Model Architecture and Objective
### Compute Infrastructure
#### Hardware
#### Software
## Citation [optional]
<!-- If there is a paper or blog post introducing the model, the APA and Bibtex information for that should go in this section. -->
**BibTeX:**
```bibtex
@misc{lv2023detrs,
title={DETRs Beat YOLOs on Real-time Object Detection},
author={Yian Zhao and Wenyu Lv and Shangliang Xu and Jinman Wei and Guanzhong Wang and Qingqing Dang and Yi Liu and Jie Chen},
year={2023},
eprint={2304.08069},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
```
**APA:**
## Glossary [optional]
<!-- If relevant, include terms and calculations in this section that can help readers understand the model or model card. -->
## More Information [optional]
## Model Card Authors [optional]
[Sangbum Choi](https://huggingface.co/danelcsb)
## Model Card Contact |