

Update image
Browse files
README.md
CHANGED
|
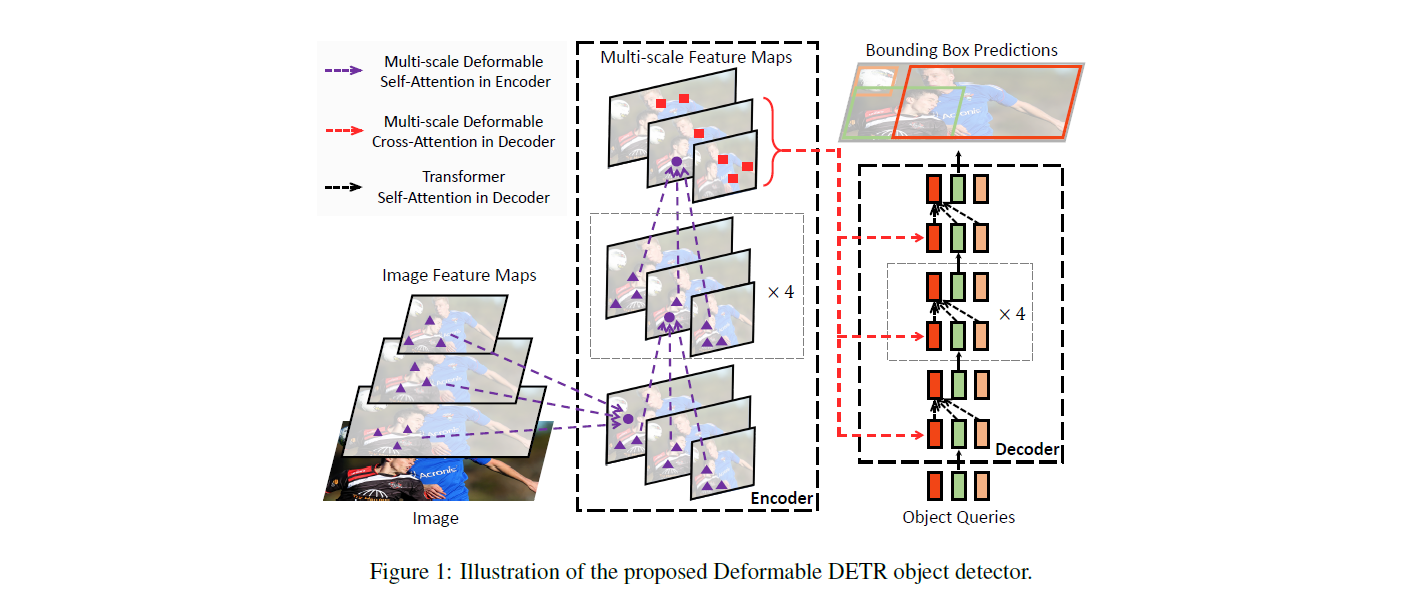
@@ -26,7 +26,7 @@ The DETR model is an encoder-decoder transformer with a convolutional backbone.
|
|
| 26 |
|
| 27 |
The model is trained using a "bipartite matching loss": one compares the predicted classes + bounding boxes of each of the N = 100 object queries to the ground truth annotations, padded up to the same length N (so if an image only contains 4 objects, 96 annotations will just have a "no object" as class and "no bounding box" as bounding box). The Hungarian matching algorithm is used to create an optimal one-to-one mapping between each of the N queries and each of the N annotations. Next, standard cross-entropy (for the classes) and a linear combination of the L1 and generalized IoU loss (for the bounding boxes) are used to optimize the parameters of the model.
|
| 28 |
|
| 29 |
-
, FOS: Computer and information sciences, FOS: Computer and information sciences},
|
| 91 |
-
|
| 92 |
title = {Deformable DETR: Deformable Transformers for End-to-End Object Detection},
|
| 93 |
-
|
| 94 |
publisher = {arXiv},
|
| 95 |
-
|
| 96 |
year = {2020},
|
| 97 |
-
|
| 98 |
copyright = {arXiv.org perpetual, non-exclusive license}
|
| 99 |
}
|
| 100 |
```
|
|
|
|
| 26 |
|
| 27 |
The model is trained using a "bipartite matching loss": one compares the predicted classes + bounding boxes of each of the N = 100 object queries to the ground truth annotations, padded up to the same length N (so if an image only contains 4 objects, 96 annotations will just have a "no object" as class and "no bounding box" as bounding box). The Hungarian matching algorithm is used to create an optimal one-to-one mapping between each of the N queries and each of the N annotations. Next, standard cross-entropy (for the classes) and a linear combination of the L1 and generalized IoU loss (for the bounding boxes) are used to optimize the parameters of the model.
|
| 28 |
|
| 29 |
+
|
| 30 |
|
| 31 |
## Intended uses & limitations
|
| 32 |
|
|
|
|
| 82 |
```bibtex
|
| 83 |
@misc{https://doi.org/10.48550/arxiv.2010.04159,
|
| 84 |
doi = {10.48550/ARXIV.2010.04159},
|
| 85 |
+
url = {https://arxiv.org/abs/2010.04159},
|
|
|
|
|
|
|
| 86 |
author = {Zhu, Xizhou and Su, Weijie and Lu, Lewei and Li, Bin and Wang, Xiaogang and Dai, Jifeng},
|
|
|
|
| 87 |
keywords = {Computer Vision and Pattern Recognition (cs.CV), FOS: Computer and information sciences, FOS: Computer and information sciences},
|
|
|
|
| 88 |
title = {Deformable DETR: Deformable Transformers for End-to-End Object Detection},
|
|
|
|
| 89 |
publisher = {arXiv},
|
|
|
|
| 90 |
year = {2020},
|
|
|
|
| 91 |
copyright = {arXiv.org perpetual, non-exclusive license}
|
| 92 |
}
|
| 93 |
```
|