
complete the model package
Browse files- README.md +90 -0
- configs/inference.json +138 -0
- configs/logging.conf +21 -0
- configs/metadata.json +82 -0
- docs/README.md +83 -0
- docs/demos.png +0 -0
- docs/license.txt +4 -0
- docs/renal.png +0 -0
- docs/unest.png +0 -0
- docs/val_dice.png +0 -0
- models/model.pt +3 -0
- scripts/__init__.py +10 -0
- scripts/__pycache__/__init__.cpython-38.pyc +0 -0
- scripts/networks/__init__.py +10 -0
- scripts/networks/__pycache__/__init__.cpython-38.pyc +0 -0
- scripts/networks/__pycache__/nest_transformer_3D.cpython-38.pyc +0 -0
- scripts/networks/__pycache__/patchEmbed3D.cpython-38.pyc +0 -0
- scripts/networks/__pycache__/unest.cpython-38.pyc +0 -0
- scripts/networks/__pycache__/unest_block.cpython-38.pyc +0 -0
- scripts/networks/nest/__init__.py +16 -0
- scripts/networks/nest/__pycache__/__init__.cpython-38.pyc +0 -0
- scripts/networks/nest/__pycache__/utils.cpython-38.pyc +0 -0
- scripts/networks/nest/utils.py +485 -0
- scripts/networks/nest_transformer_3D.py +489 -0
- scripts/networks/patchEmbed3D.py +190 -0
- scripts/networks/unest.py +274 -0
- scripts/networks/unest_block.py +245 -0
README.md
ADDED
|
@@ -0,0 +1,90 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
---
|
| 2 |
+
tags:
|
| 3 |
+
- monai
|
| 4 |
+
- medical
|
| 5 |
+
library_name: monai
|
| 6 |
+
license: unknown
|
| 7 |
+
---
|
| 8 |
+
# Description
|
| 9 |
+
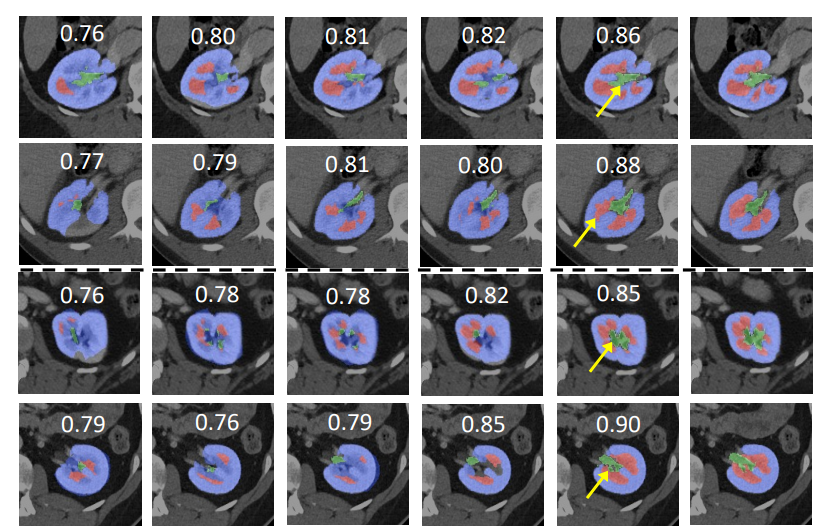
A pre-trained model for inferencing volumetric (3D) kidney substructures segmentation from contrast-enhanced CT images (Arterial/Portal Venous Phase).
|
| 10 |
+
A tutorial and release of model for kidney cortex, medulla and collecting system segmentation.
|
| 11 |
+
|
| 12 |
+
Authors: Yinchi Zhou (yinchi.zhou@vanderbilt.edu) | Xin Yu (xin.yu@vanderbilt.edu) | Yucheng Tang (yuchengt@nvidia.com) |
|
| 13 |
+
|
| 14 |
+
|
| 15 |
+
# Model Overview
|
| 16 |
+
A pre-trained UNEST base model [1] for volumetric (3D) renal structures segmentation using dynamic contrast enhanced arterial or venous phase CT images.
|
| 17 |
+
|
| 18 |
+
## Data
|
| 19 |
+
The training data is from the [ImageVU RenalSeg dataset] from Vanderbilt University and Vanderbilt University Medical Center.
|
| 20 |
+
(The training data is not public available yet).
|
| 21 |
+
|
| 22 |
+
- Target: Renal Cortex | Medulla | Pelvis Collecting System
|
| 23 |
+
- Task: Segmentation
|
| 24 |
+
- Modality: CT (Artrial | Venous phase)
|
| 25 |
+
- Size: 96 3D volumes
|
| 26 |
+
|
| 27 |
+
|
| 28 |
+
The data and segmentation demonstration is as follow:
|
| 29 |
+
|
| 30 |
+
 <br>
|
| 31 |
+
|
| 32 |
+
## Method and Network
|
| 33 |
+
|
| 34 |
+
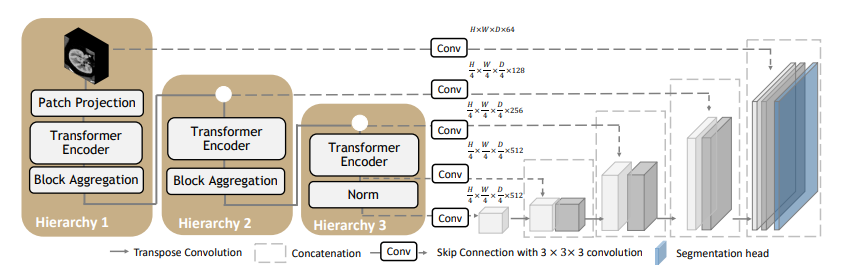
The UNEST model is a 3D hierarchical transformer-based semgnetation network.
|
| 35 |
+
|
| 36 |
+
Details of the architecture:
|
| 37 |
+
 <br>
|
| 38 |
+
|
| 39 |
+
## Training configuration
|
| 40 |
+
The training was performed with at least one 16GB-memory GPU.
|
| 41 |
+
|
| 42 |
+
Actual Model Input: 96 x 96 x 96
|
| 43 |
+
|
| 44 |
+
## Input and output formats
|
| 45 |
+
Input: 1 channel CT image
|
| 46 |
+
|
| 47 |
+
Output: 4: 0:Background, 1:Renal Cortex, 2:Medulla, 3:Pelvicalyceal System
|
| 48 |
+
|
| 49 |
+
## Performance
|
| 50 |
+
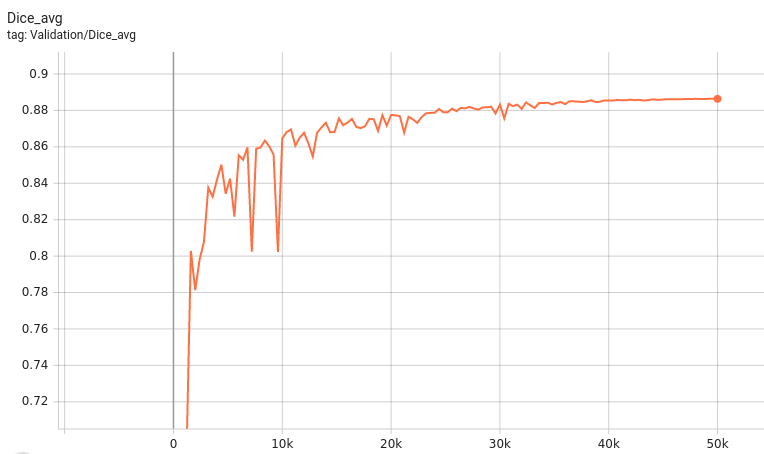
A graph showing the validation mean Dice for 5000 epochs.
|
| 51 |
+
|
| 52 |
+
 <br>
|
| 53 |
+
|
| 54 |
+
This model achieves the following Dice score on the validation data (our own split from the training dataset):
|
| 55 |
+
|
| 56 |
+
Mean Valdiation Dice = 0.8523
|
| 57 |
+
|
| 58 |
+
Note that mean dice is computed in the original spacing of the input data.
|
| 59 |
+
|
| 60 |
+
## commands example
|
| 61 |
+
Download trained checkpoint model to ./model/model.pt:
|
| 62 |
+
|
| 63 |
+
|
| 64 |
+
Add scripts component: To run the workflow with customized components, PYTHONPATH should be revised to include the path to the customized component:
|
| 65 |
+
|
| 66 |
+
```
|
| 67 |
+
export PYTHONPATH=$PYTHONPATH:"'<path to the bundle root dir>/scripts'"
|
| 68 |
+
|
| 69 |
+
```
|
| 70 |
+
|
| 71 |
+
|
| 72 |
+
Execute inference:
|
| 73 |
+
|
| 74 |
+
```
|
| 75 |
+
python -m monai.bundle run evaluating --meta_file configs/metadata.json --config_file configs/inference.json --logging_file configs/logging.conf
|
| 76 |
+
```
|
| 77 |
+
|
| 78 |
+
|
| 79 |
+
## More examples output
|
| 80 |
+
|
| 81 |
+
 <br>
|
| 82 |
+
|
| 83 |
+
|
| 84 |
+
# Disclaimer
|
| 85 |
+
This is an example, not to be used for diagnostic purposes.
|
| 86 |
+
|
| 87 |
+
# References
|
| 88 |
+
[1] Yu, Xin, Yinchi Zhou, Yucheng Tang et al. "Characterizing Renal Structures with 3D Block Aggregate Transformers." arXiv preprint arXiv:2203.02430 (2022). https://arxiv.org/pdf/2203.02430.pdf
|
| 89 |
+
|
| 90 |
+
[2] Zizhao Zhang et al. "Nested Hierarchical Transformer: Towards Accurate, Data-Efficient and Interpretable Visual Understanding." AAAI Conference on Artificial Intelligence (AAAI) 2022
|
configs/inference.json
ADDED
|
@@ -0,0 +1,138 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
{
|
| 2 |
+
"imports": [
|
| 3 |
+
"$import glob",
|
| 4 |
+
"$import os"
|
| 5 |
+
],
|
| 6 |
+
"bundle_root": "/models/renalStructures_UNEST_segmentation",
|
| 7 |
+
"output_dir": "$@bundle_root + '/eval'",
|
| 8 |
+
"dataset_dir": "$@bundle_root + './dataset/spleen'",
|
| 9 |
+
"datalist": "$list(sorted(glob.glob(@dataset_dir + '/*.nii.gz')))",
|
| 10 |
+
"device": "$torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')",
|
| 11 |
+
"network_def": {
|
| 12 |
+
"_target_": "scripts.networks.unest.UNesT",
|
| 13 |
+
"in_channels": 1,
|
| 14 |
+
"out_channels": 4
|
| 15 |
+
},
|
| 16 |
+
"network": "$@network_def.to(@device)",
|
| 17 |
+
"preprocessing": {
|
| 18 |
+
"_target_": "Compose",
|
| 19 |
+
"transforms": [
|
| 20 |
+
{
|
| 21 |
+
"_target_": "LoadImaged",
|
| 22 |
+
"keys": "image"
|
| 23 |
+
},
|
| 24 |
+
{
|
| 25 |
+
"_target_": "AddChanneld",
|
| 26 |
+
"keys": "image"
|
| 27 |
+
},
|
| 28 |
+
{
|
| 29 |
+
"_target_": "Orientationd",
|
| 30 |
+
"keys": "image",
|
| 31 |
+
"axcodes": "RAS"
|
| 32 |
+
},
|
| 33 |
+
{
|
| 34 |
+
"_target_": "Spacingd",
|
| 35 |
+
"keys": "image",
|
| 36 |
+
"pixdim": [
|
| 37 |
+
1.0,
|
| 38 |
+
1.0,
|
| 39 |
+
1.0
|
| 40 |
+
],
|
| 41 |
+
"mode": "bilinear"
|
| 42 |
+
},
|
| 43 |
+
{
|
| 44 |
+
"_target_": "ScaleIntensityRanged",
|
| 45 |
+
"keys": "image",
|
| 46 |
+
"a_min": -175,
|
| 47 |
+
"a_max": 250,
|
| 48 |
+
"b_min": 0.0,
|
| 49 |
+
"b_max": 1.0,
|
| 50 |
+
"clip": true
|
| 51 |
+
},
|
| 52 |
+
{
|
| 53 |
+
"_target_": "EnsureTyped",
|
| 54 |
+
"keys": "image"
|
| 55 |
+
}
|
| 56 |
+
]
|
| 57 |
+
},
|
| 58 |
+
"dataset": {
|
| 59 |
+
"_target_": "Dataset",
|
| 60 |
+
"data": "$[{'image': i} for i in @datalist]",
|
| 61 |
+
"transform": "@preprocessing"
|
| 62 |
+
},
|
| 63 |
+
"dataloader": {
|
| 64 |
+
"_target_": "DataLoader",
|
| 65 |
+
"dataset": "@dataset",
|
| 66 |
+
"batch_size": 1,
|
| 67 |
+
"shuffle": false,
|
| 68 |
+
"num_workers": 4
|
| 69 |
+
},
|
| 70 |
+
"inferer": {
|
| 71 |
+
"_target_": "SlidingWindowInferer",
|
| 72 |
+
"roi_size": [
|
| 73 |
+
96,
|
| 74 |
+
96,
|
| 75 |
+
96
|
| 76 |
+
],
|
| 77 |
+
"sw_batch_size": 4,
|
| 78 |
+
"overlap": 0.5
|
| 79 |
+
},
|
| 80 |
+
"postprocessing": {
|
| 81 |
+
"_target_": "Compose",
|
| 82 |
+
"transforms": [
|
| 83 |
+
{
|
| 84 |
+
"_target_": "Activationsd",
|
| 85 |
+
"keys": "pred",
|
| 86 |
+
"softmax": true
|
| 87 |
+
},
|
| 88 |
+
{
|
| 89 |
+
"_target_": "Invertd",
|
| 90 |
+
"keys": "pred",
|
| 91 |
+
"transform": "@preprocessing",
|
| 92 |
+
"orig_keys": "image",
|
| 93 |
+
"meta_key_postfix": "meta_dict",
|
| 94 |
+
"nearest_interp": false,
|
| 95 |
+
"to_tensor": true
|
| 96 |
+
},
|
| 97 |
+
{
|
| 98 |
+
"_target_": "AsDiscreted",
|
| 99 |
+
"keys": "pred",
|
| 100 |
+
"argmax": true
|
| 101 |
+
},
|
| 102 |
+
{
|
| 103 |
+
"_target_": "SaveImaged",
|
| 104 |
+
"keys": "pred",
|
| 105 |
+
"meta_keys": "pred_meta_dict",
|
| 106 |
+
"output_dir": "@output_dir"
|
| 107 |
+
}
|
| 108 |
+
]
|
| 109 |
+
},
|
| 110 |
+
"handlers": [
|
| 111 |
+
{
|
| 112 |
+
"_target_": "CheckpointLoader",
|
| 113 |
+
"load_path": "$@bundle_root + '/models/model.pt'",
|
| 114 |
+
"load_dict": {
|
| 115 |
+
"state_dict": "@network"
|
| 116 |
+
},
|
| 117 |
+
"strict": "True"
|
| 118 |
+
},
|
| 119 |
+
{
|
| 120 |
+
"_target_": "StatsHandler",
|
| 121 |
+
"iteration_log": false
|
| 122 |
+
}
|
| 123 |
+
],
|
| 124 |
+
"evaluator": {
|
| 125 |
+
"_target_": "SupervisedEvaluator",
|
| 126 |
+
"device": "@device",
|
| 127 |
+
"val_data_loader": "@dataloader",
|
| 128 |
+
"network": "@network",
|
| 129 |
+
"inferer": "@inferer",
|
| 130 |
+
"postprocessing": "@postprocessing",
|
| 131 |
+
"val_handlers": "@handlers",
|
| 132 |
+
"amp": false
|
| 133 |
+
},
|
| 134 |
+
"evaluating": [
|
| 135 |
+
"$setattr(torch.backends.cudnn, 'benchmark', True)",
|
| 136 |
+
"$@evaluator.run()"
|
| 137 |
+
]
|
| 138 |
+
}
|
configs/logging.conf
ADDED
|
@@ -0,0 +1,21 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
[loggers]
|
| 2 |
+
keys=root
|
| 3 |
+
|
| 4 |
+
[handlers]
|
| 5 |
+
keys=consoleHandler
|
| 6 |
+
|
| 7 |
+
[formatters]
|
| 8 |
+
keys=fullFormatter
|
| 9 |
+
|
| 10 |
+
[logger_root]
|
| 11 |
+
level=INFO
|
| 12 |
+
handlers=consoleHandler
|
| 13 |
+
|
| 14 |
+
[handler_consoleHandler]
|
| 15 |
+
class=StreamHandler
|
| 16 |
+
level=INFO
|
| 17 |
+
formatter=fullFormatter
|
| 18 |
+
args=(sys.stdout,)
|
| 19 |
+
|
| 20 |
+
[formatter_fullFormatter]
|
| 21 |
+
format=%(asctime)s - %(name)s - %(levelname)s - %(message)s
|
configs/metadata.json
ADDED
|
@@ -0,0 +1,82 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
{
|
| 2 |
+
"schema": "https://github.com/Project-MONAI/MONAI-extra-test-data/releases/download/0.8.1/meta_schema_20220324.json",
|
| 3 |
+
"version": "0.1.0",
|
| 4 |
+
"changelog": {
|
| 5 |
+
"0.1.0": "complete the model package",
|
| 6 |
+
"0.0.1": "initialize the model package structure"
|
| 7 |
+
},
|
| 8 |
+
"monai_version": "0.9.0",
|
| 9 |
+
"pytorch_version": "1.10.0",
|
| 10 |
+
"numpy_version": "1.21.2",
|
| 11 |
+
"optional_packages_version": {
|
| 12 |
+
"nibabel": "3.2.1",
|
| 13 |
+
"pytorch-ignite": "0.4.8",
|
| 14 |
+
"einops": "0.4.1",
|
| 15 |
+
"fire": "0.4.0",
|
| 16 |
+
"timm": "0.6.7"
|
| 17 |
+
},
|
| 18 |
+
"task": "Renal segmentation",
|
| 19 |
+
"description": "A transformer-based model for renal segmentation from CT image",
|
| 20 |
+
"authors": "Vanderbilt University + MONAI team",
|
| 21 |
+
"copyright": "Copyright (c) MONAI Consortium",
|
| 22 |
+
"data_source": "RawData.zip",
|
| 23 |
+
"data_type": "nibabel",
|
| 24 |
+
"image_classes": "single channel data, intensity scaled to [0, 1]",
|
| 25 |
+
"label_classes": "1: Kideny Cortex, 2:Medulla, 3:Pelvicalyceal system",
|
| 26 |
+
"pred_classes": "1: Kideny Cortex, 2:Medulla, 3:Pelvicalyceal system",
|
| 27 |
+
"eval_metrics": {
|
| 28 |
+
"mean_dice": 0.85
|
| 29 |
+
},
|
| 30 |
+
"intended_use": "This is an example, not to be used for diagnostic purposes",
|
| 31 |
+
"references": [
|
| 32 |
+
"Tang, Yucheng, et al. 'Self-supervised pre-training of swin transformers for 3d medical image analysis. arXiv preprint arXiv:2111.14791 (2021). https://arxiv.org/abs/2111.14791."
|
| 33 |
+
],
|
| 34 |
+
"network_data_format": {
|
| 35 |
+
"inputs": {
|
| 36 |
+
"image": {
|
| 37 |
+
"type": "image",
|
| 38 |
+
"format": "hounsfield",
|
| 39 |
+
"modality": "CT",
|
| 40 |
+
"num_channels": 1,
|
| 41 |
+
"spatial_shape": [
|
| 42 |
+
96,
|
| 43 |
+
96,
|
| 44 |
+
96
|
| 45 |
+
],
|
| 46 |
+
"dtype": "float32",
|
| 47 |
+
"value_range": [
|
| 48 |
+
0,
|
| 49 |
+
1
|
| 50 |
+
],
|
| 51 |
+
"is_patch_data": true,
|
| 52 |
+
"channel_def": {
|
| 53 |
+
"0": "image"
|
| 54 |
+
}
|
| 55 |
+
}
|
| 56 |
+
},
|
| 57 |
+
"outputs": {
|
| 58 |
+
"pred": {
|
| 59 |
+
"type": "image",
|
| 60 |
+
"format": "segmentation",
|
| 61 |
+
"num_channels": 4,
|
| 62 |
+
"spatial_shape": [
|
| 63 |
+
96,
|
| 64 |
+
96,
|
| 65 |
+
96
|
| 66 |
+
],
|
| 67 |
+
"dtype": "float32",
|
| 68 |
+
"value_range": [
|
| 69 |
+
0,
|
| 70 |
+
1
|
| 71 |
+
],
|
| 72 |
+
"is_patch_data": true,
|
| 73 |
+
"channel_def": {
|
| 74 |
+
"0": "background",
|
| 75 |
+
"1": "kidney cortex",
|
| 76 |
+
"2": "medulla",
|
| 77 |
+
"3": "pelvicalyceal system"
|
| 78 |
+
}
|
| 79 |
+
}
|
| 80 |
+
}
|
| 81 |
+
}
|
| 82 |
+
}
|
docs/README.md
ADDED
|
@@ -0,0 +1,83 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# Description
|
| 2 |
+
A pre-trained model for inferencing volumetric (3D) kidney substructures segmentation from contrast-enhanced CT images (Arterial/Portal Venous Phase).
|
| 3 |
+
A tutorial and release of model for kidney cortex, medulla and collecting system segmentation.
|
| 4 |
+
|
| 5 |
+
Authors: Yinchi Zhou (yinchi.zhou@vanderbilt.edu) | Xin Yu (xin.yu@vanderbilt.edu) | Yucheng Tang (yuchengt@nvidia.com) |
|
| 6 |
+
|
| 7 |
+
|
| 8 |
+
# Model Overview
|
| 9 |
+
A pre-trained UNEST base model [1] for volumetric (3D) renal structures segmentation using dynamic contrast enhanced arterial or venous phase CT images.
|
| 10 |
+
|
| 11 |
+
## Data
|
| 12 |
+
The training data is from the [ImageVU RenalSeg dataset] from Vanderbilt University and Vanderbilt University Medical Center.
|
| 13 |
+
(The training data is not public available yet).
|
| 14 |
+
|
| 15 |
+
- Target: Renal Cortex | Medulla | Pelvis Collecting System
|
| 16 |
+
- Task: Segmentation
|
| 17 |
+
- Modality: CT (Artrial | Venous phase)
|
| 18 |
+
- Size: 96 3D volumes
|
| 19 |
+
|
| 20 |
+
|
| 21 |
+
The data and segmentation demonstration is as follow:
|
| 22 |
+
|
| 23 |
+
 <br>
|
| 24 |
+
|
| 25 |
+
## Method and Network
|
| 26 |
+
|
| 27 |
+
The UNEST model is a 3D hierarchical transformer-based semgnetation network.
|
| 28 |
+
|
| 29 |
+
Details of the architecture:
|
| 30 |
+
 <br>
|
| 31 |
+
|
| 32 |
+
## Training configuration
|
| 33 |
+
The training was performed with at least one 16GB-memory GPU.
|
| 34 |
+
|
| 35 |
+
Actual Model Input: 96 x 96 x 96
|
| 36 |
+
|
| 37 |
+
## Input and output formats
|
| 38 |
+
Input: 1 channel CT image
|
| 39 |
+
|
| 40 |
+
Output: 4: 0:Background, 1:Renal Cortex, 2:Medulla, 3:Pelvicalyceal System
|
| 41 |
+
|
| 42 |
+
## Performance
|
| 43 |
+
A graph showing the validation mean Dice for 5000 epochs.
|
| 44 |
+
|
| 45 |
+
 <br>
|
| 46 |
+
|
| 47 |
+
This model achieves the following Dice score on the validation data (our own split from the training dataset):
|
| 48 |
+
|
| 49 |
+
Mean Valdiation Dice = 0.8523
|
| 50 |
+
|
| 51 |
+
Note that mean dice is computed in the original spacing of the input data.
|
| 52 |
+
|
| 53 |
+
## commands example
|
| 54 |
+
Download trained checkpoint model to ./model/model.pt:
|
| 55 |
+
|
| 56 |
+
|
| 57 |
+
Add scripts component: To run the workflow with customized components, PYTHONPATH should be revised to include the path to the customized component:
|
| 58 |
+
|
| 59 |
+
```
|
| 60 |
+
export PYTHONPATH=$PYTHONPATH:"'<path to the bundle root dir>/scripts'"
|
| 61 |
+
|
| 62 |
+
```
|
| 63 |
+
|
| 64 |
+
|
| 65 |
+
Execute inference:
|
| 66 |
+
|
| 67 |
+
```
|
| 68 |
+
python -m monai.bundle run evaluating --meta_file configs/metadata.json --config_file configs/inference.json --logging_file configs/logging.conf
|
| 69 |
+
```
|
| 70 |
+
|
| 71 |
+
|
| 72 |
+
## More examples output
|
| 73 |
+
|
| 74 |
+
 <br>
|
| 75 |
+
|
| 76 |
+
|
| 77 |
+
# Disclaimer
|
| 78 |
+
This is an example, not to be used for diagnostic purposes.
|
| 79 |
+
|
| 80 |
+
# References
|
| 81 |
+
[1] Yu, Xin, Yinchi Zhou, Yucheng Tang et al. "Characterizing Renal Structures with 3D Block Aggregate Transformers." arXiv preprint arXiv:2203.02430 (2022). https://arxiv.org/pdf/2203.02430.pdf
|
| 82 |
+
|
| 83 |
+
[2] Zizhao Zhang et al. "Nested Hierarchical Transformer: Towards Accurate, Data-Efficient and Interpretable Visual Understanding." AAAI Conference on Artificial Intelligence (AAAI) 2022
|
docs/demos.png
ADDED
|
docs/license.txt
ADDED
|
@@ -0,0 +1,4 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
Third Party Licenses
|
| 2 |
+
-----------------------------------------------------------------------
|
| 3 |
+
|
| 4 |
+
/*********************************************************************/
|
docs/renal.png
ADDED

|
docs/unest.png
ADDED
|
docs/val_dice.png
ADDED
|
models/model.pt
ADDED
|
@@ -0,0 +1,3 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
version https://git-lfs.github.com/spec/v1
|
| 2 |
+
oid sha256:8928e88771d31945c51d1b302a8448825e6f9861a543a6e1023acb9576840962
|
| 3 |
+
size 348887167
|
scripts/__init__.py
ADDED
|
@@ -0,0 +1,10 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# Copyright (c) MONAI Consortium
|
| 2 |
+
# Licensed under the Apache License, Version 2.0 (the "License");
|
| 3 |
+
# you may not use this file except in compliance with the License.
|
| 4 |
+
# You may obtain a copy of the License at
|
| 5 |
+
# http://www.apache.org/licenses/LICENSE-2.0
|
| 6 |
+
# Unless required by applicable law or agreed to in writing, software
|
| 7 |
+
# distributed under the License is distributed on an "AS IS" BASIS,
|
| 8 |
+
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
| 9 |
+
# See the License for the specific language governing permissions and
|
| 10 |
+
# limitations under the License.
|
scripts/__pycache__/__init__.cpython-38.pyc
ADDED
|
Binary file (192 Bytes). View file
|
|
|
scripts/networks/__init__.py
ADDED
|
@@ -0,0 +1,10 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# Copyright (c) MONAI Consortium
|
| 2 |
+
# Licensed under the Apache License, Version 2.0 (the "License");
|
| 3 |
+
# you may not use this file except in compliance with the License.
|
| 4 |
+
# You may obtain a copy of the License at
|
| 5 |
+
# http://www.apache.org/licenses/LICENSE-2.0
|
| 6 |
+
# Unless required by applicable law or agreed to in writing, software
|
| 7 |
+
# distributed under the License is distributed on an "AS IS" BASIS,
|
| 8 |
+
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
| 9 |
+
# See the License for the specific language governing permissions and
|
| 10 |
+
# limitations under the License.
|
scripts/networks/__pycache__/__init__.cpython-38.pyc
ADDED
|
Binary file (201 Bytes). View file
|
|
|
scripts/networks/__pycache__/nest_transformer_3D.cpython-38.pyc
ADDED
|
Binary file (15.5 kB). View file
|
|
|
scripts/networks/__pycache__/patchEmbed3D.cpython-38.pyc
ADDED
|
Binary file (5.8 kB). View file
|
|
|
scripts/networks/__pycache__/unest.cpython-38.pyc
ADDED
|
Binary file (5.79 kB). View file
|
|
|
scripts/networks/__pycache__/unest_block.cpython-38.pyc
ADDED
|
Binary file (5.45 kB). View file
|
|
|
scripts/networks/nest/__init__.py
ADDED
|
@@ -0,0 +1,16 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
#!/usr/bin/env python3
|
| 2 |
+
from .utils import (
|
| 3 |
+
Conv3dSame,
|
| 4 |
+
DropPath,
|
| 5 |
+
Linear,
|
| 6 |
+
Mlp,
|
| 7 |
+
_assert,
|
| 8 |
+
conv3d_same,
|
| 9 |
+
create_conv3d,
|
| 10 |
+
create_pool3d,
|
| 11 |
+
get_padding,
|
| 12 |
+
get_same_padding,
|
| 13 |
+
pad_same,
|
| 14 |
+
to_ntuple,
|
| 15 |
+
trunc_normal_,
|
| 16 |
+
)
|
scripts/networks/nest/__pycache__/__init__.cpython-38.pyc
ADDED
|
Binary file (496 Bytes). View file
|
|
|
scripts/networks/nest/__pycache__/utils.cpython-38.pyc
ADDED
|
Binary file (15.2 kB). View file
|
|
|
scripts/networks/nest/utils.py
ADDED
|
@@ -0,0 +1,485 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
#!/usr/bin/env python3
|
| 2 |
+
|
| 3 |
+
|
| 4 |
+
import collections.abc
|
| 5 |
+
import math
|
| 6 |
+
import warnings
|
| 7 |
+
from itertools import repeat
|
| 8 |
+
from typing import List, Optional, Tuple
|
| 9 |
+
|
| 10 |
+
import torch
|
| 11 |
+
import torch.nn as nn
|
| 12 |
+
import torch.nn.functional as F
|
| 13 |
+
|
| 14 |
+
try:
|
| 15 |
+
from torch import _assert
|
| 16 |
+
except ImportError:
|
| 17 |
+
|
| 18 |
+
def _assert(condition: bool, message: str):
|
| 19 |
+
assert condition, message
|
| 20 |
+
|
| 21 |
+
|
| 22 |
+
def drop_block_2d(
|
| 23 |
+
x,
|
| 24 |
+
drop_prob: float = 0.1,
|
| 25 |
+
block_size: int = 7,
|
| 26 |
+
gamma_scale: float = 1.0,
|
| 27 |
+
with_noise: bool = False,
|
| 28 |
+
inplace: bool = False,
|
| 29 |
+
batchwise: bool = False,
|
| 30 |
+
):
|
| 31 |
+
"""DropBlock. See https://arxiv.org/pdf/1810.12890.pdf
|
| 32 |
+
|
| 33 |
+
DropBlock with an experimental gaussian noise option. This layer has been tested on a few training
|
| 34 |
+
runs with success, but needs further validation and possibly optimization for lower runtime impact.
|
| 35 |
+
"""
|
| 36 |
+
b, c, h, w = x.shape
|
| 37 |
+
total_size = w * h
|
| 38 |
+
clipped_block_size = min(block_size, min(w, h))
|
| 39 |
+
# seed_drop_rate, the gamma parameter
|
| 40 |
+
gamma = (
|
| 41 |
+
gamma_scale * drop_prob * total_size / clipped_block_size**2 / ((w - block_size + 1) * (h - block_size + 1))
|
| 42 |
+
)
|
| 43 |
+
|
| 44 |
+
# Forces the block to be inside the feature map.
|
| 45 |
+
w_i, h_i = torch.meshgrid(torch.arange(w).to(x.device), torch.arange(h).to(x.device))
|
| 46 |
+
valid_block = ((w_i >= clipped_block_size // 2) & (w_i < w - (clipped_block_size - 1) // 2)) & (
|
| 47 |
+
(h_i >= clipped_block_size // 2) & (h_i < h - (clipped_block_size - 1) // 2)
|
| 48 |
+
)
|
| 49 |
+
valid_block = torch.reshape(valid_block, (1, 1, h, w)).to(dtype=x.dtype)
|
| 50 |
+
|
| 51 |
+
if batchwise:
|
| 52 |
+
# one mask for whole batch, quite a bit faster
|
| 53 |
+
uniform_noise = torch.rand((1, c, h, w), dtype=x.dtype, device=x.device)
|
| 54 |
+
else:
|
| 55 |
+
uniform_noise = torch.rand_like(x)
|
| 56 |
+
block_mask = ((2 - gamma - valid_block + uniform_noise) >= 1).to(dtype=x.dtype)
|
| 57 |
+
block_mask = -F.max_pool2d(
|
| 58 |
+
-block_mask, kernel_size=clipped_block_size, stride=1, padding=clipped_block_size // 2 # block_size,
|
| 59 |
+
)
|
| 60 |
+
|
| 61 |
+
if with_noise:
|
| 62 |
+
normal_noise = torch.randn((1, c, h, w), dtype=x.dtype, device=x.device) if batchwise else torch.randn_like(x)
|
| 63 |
+
if inplace:
|
| 64 |
+
x.mul_(block_mask).add_(normal_noise * (1 - block_mask))
|
| 65 |
+
else:
|
| 66 |
+
x = x * block_mask + normal_noise * (1 - block_mask)
|
| 67 |
+
else:
|
| 68 |
+
normalize_scale = (block_mask.numel() / block_mask.to(dtype=torch.float32).sum().add(1e-7)).to(x.dtype)
|
| 69 |
+
if inplace:
|
| 70 |
+
x.mul_(block_mask * normalize_scale)
|
| 71 |
+
else:
|
| 72 |
+
x = x * block_mask * normalize_scale
|
| 73 |
+
return x
|
| 74 |
+
|
| 75 |
+
|
| 76 |
+
def drop_block_fast_2d(
|
| 77 |
+
x: torch.Tensor,
|
| 78 |
+
drop_prob: float = 0.1,
|
| 79 |
+
block_size: int = 7,
|
| 80 |
+
gamma_scale: float = 1.0,
|
| 81 |
+
with_noise: bool = False,
|
| 82 |
+
inplace: bool = False,
|
| 83 |
+
):
|
| 84 |
+
"""DropBlock. See https://arxiv.org/pdf/1810.12890.pdf
|
| 85 |
+
|
| 86 |
+
DropBlock with an experimental gaussian noise option. Simplied from above without concern for valid
|
| 87 |
+
block mask at edges.
|
| 88 |
+
"""
|
| 89 |
+
b, c, h, w = x.shape
|
| 90 |
+
total_size = w * h
|
| 91 |
+
clipped_block_size = min(block_size, min(w, h))
|
| 92 |
+
gamma = (
|
| 93 |
+
gamma_scale * drop_prob * total_size / clipped_block_size**2 / ((w - block_size + 1) * (h - block_size + 1))
|
| 94 |
+
)
|
| 95 |
+
|
| 96 |
+
block_mask = torch.empty_like(x).bernoulli_(gamma)
|
| 97 |
+
block_mask = F.max_pool2d(
|
| 98 |
+
block_mask.to(x.dtype), kernel_size=clipped_block_size, stride=1, padding=clipped_block_size // 2
|
| 99 |
+
)
|
| 100 |
+
|
| 101 |
+
if with_noise:
|
| 102 |
+
normal_noise = torch.empty_like(x).normal_()
|
| 103 |
+
if inplace:
|
| 104 |
+
x.mul_(1.0 - block_mask).add_(normal_noise * block_mask)
|
| 105 |
+
else:
|
| 106 |
+
x = x * (1.0 - block_mask) + normal_noise * block_mask
|
| 107 |
+
else:
|
| 108 |
+
block_mask = 1 - block_mask
|
| 109 |
+
normalize_scale = (block_mask.numel() / block_mask.to(dtype=torch.float32).sum().add(1e-6)).to(dtype=x.dtype)
|
| 110 |
+
if inplace:
|
| 111 |
+
x.mul_(block_mask * normalize_scale)
|
| 112 |
+
else:
|
| 113 |
+
x = x * block_mask * normalize_scale
|
| 114 |
+
return x
|
| 115 |
+
|
| 116 |
+
|
| 117 |
+
class DropBlock2d(nn.Module):
|
| 118 |
+
"""DropBlock. See https://arxiv.org/pdf/1810.12890.pdf"""
|
| 119 |
+
|
| 120 |
+
def __init__(
|
| 121 |
+
self, drop_prob=0.1, block_size=7, gamma_scale=1.0, with_noise=False, inplace=False, batchwise=False, fast=True
|
| 122 |
+
):
|
| 123 |
+
super(DropBlock2d, self).__init__()
|
| 124 |
+
self.drop_prob = drop_prob
|
| 125 |
+
self.gamma_scale = gamma_scale
|
| 126 |
+
self.block_size = block_size
|
| 127 |
+
self.with_noise = with_noise
|
| 128 |
+
self.inplace = inplace
|
| 129 |
+
self.batchwise = batchwise
|
| 130 |
+
self.fast = fast # FIXME finish comparisons of fast vs not
|
| 131 |
+
|
| 132 |
+
def forward(self, x):
|
| 133 |
+
if not self.training or not self.drop_prob:
|
| 134 |
+
return x
|
| 135 |
+
if self.fast:
|
| 136 |
+
return drop_block_fast_2d(
|
| 137 |
+
x, self.drop_prob, self.block_size, self.gamma_scale, self.with_noise, self.inplace
|
| 138 |
+
)
|
| 139 |
+
else:
|
| 140 |
+
return drop_block_2d(
|
| 141 |
+
x, self.drop_prob, self.block_size, self.gamma_scale, self.with_noise, self.inplace, self.batchwise
|
| 142 |
+
)
|
| 143 |
+
|
| 144 |
+
|
| 145 |
+
def drop_path(x, drop_prob: float = 0.0, training: bool = False, scale_by_keep: bool = True):
|
| 146 |
+
"""Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).
|
| 147 |
+
|
| 148 |
+
This is the same as the DropConnect impl I created for EfficientNet, etc networks, however,
|
| 149 |
+
the original name is misleading as 'Drop Connect' is a different form of dropout in a separate paper...
|
| 150 |
+
See discussion: https://github.com/tensorflow/tpu/issues/494#issuecomment-532968956 ... I've opted for
|
| 151 |
+
changing the layer and argument names to 'drop path' rather than mix DropConnect as a layer name and use
|
| 152 |
+
'survival rate' as the argument.
|
| 153 |
+
|
| 154 |
+
"""
|
| 155 |
+
if drop_prob == 0.0 or not training:
|
| 156 |
+
return x
|
| 157 |
+
keep_prob = 1 - drop_prob
|
| 158 |
+
shape = (x.shape[0],) + (1,) * (x.ndim - 1) # work with diff dim tensors, not just 2D ConvNets
|
| 159 |
+
random_tensor = x.new_empty(shape).bernoulli_(keep_prob)
|
| 160 |
+
if keep_prob > 0.0 and scale_by_keep:
|
| 161 |
+
random_tensor.div_(keep_prob)
|
| 162 |
+
return x * random_tensor
|
| 163 |
+
|
| 164 |
+
|
| 165 |
+
class DropPath(nn.Module):
|
| 166 |
+
"""Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks)."""
|
| 167 |
+
|
| 168 |
+
def __init__(self, drop_prob=None, scale_by_keep=True):
|
| 169 |
+
super(DropPath, self).__init__()
|
| 170 |
+
self.drop_prob = drop_prob
|
| 171 |
+
self.scale_by_keep = scale_by_keep
|
| 172 |
+
|
| 173 |
+
def forward(self, x):
|
| 174 |
+
return drop_path(x, self.drop_prob, self.training, self.scale_by_keep)
|
| 175 |
+
|
| 176 |
+
|
| 177 |
+
def create_conv3d(in_channels, out_channels, kernel_size, **kwargs):
|
| 178 |
+
"""Select a 2d convolution implementation based on arguments
|
| 179 |
+
Creates and returns one of torch.nn.Conv2d, Conv2dSame, MixedConv3d, or CondConv2d.
|
| 180 |
+
|
| 181 |
+
Used extensively by EfficientNet, MobileNetv3 and related networks.
|
| 182 |
+
"""
|
| 183 |
+
|
| 184 |
+
depthwise = kwargs.pop("depthwise", False)
|
| 185 |
+
# for DW out_channels must be multiple of in_channels as must have out_channels % groups == 0
|
| 186 |
+
groups = in_channels if depthwise else kwargs.pop("groups", 1)
|
| 187 |
+
|
| 188 |
+
m = create_conv3d_pad(in_channels, out_channels, kernel_size, groups=groups, **kwargs)
|
| 189 |
+
return m
|
| 190 |
+
|
| 191 |
+
|
| 192 |
+
def conv3d_same(
|
| 193 |
+
x,
|
| 194 |
+
weight: torch.Tensor,
|
| 195 |
+
bias: Optional[torch.Tensor] = None,
|
| 196 |
+
stride: Tuple[int, int] = (1, 1, 1),
|
| 197 |
+
padding: Tuple[int, int] = (0, 0, 0),
|
| 198 |
+
dilation: Tuple[int, int] = (1, 1, 1),
|
| 199 |
+
groups: int = 1,
|
| 200 |
+
):
|
| 201 |
+
x = pad_same(x, weight.shape[-3:], stride, dilation)
|
| 202 |
+
return F.conv3d(x, weight, bias, stride, (0, 0, 0), dilation, groups)
|
| 203 |
+
|
| 204 |
+
|
| 205 |
+
class Conv3dSame(nn.Conv2d):
|
| 206 |
+
"""Tensorflow like 'SAME' convolution wrapper for 2D convolutions"""
|
| 207 |
+
|
| 208 |
+
def __init__(self, in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True):
|
| 209 |
+
super(Conv3dSame, self).__init__(in_channels, out_channels, kernel_size, stride, 0, dilation, groups, bias)
|
| 210 |
+
|
| 211 |
+
def forward(self, x):
|
| 212 |
+
return conv3d_same(x, self.weight, self.bias, self.stride, self.padding, self.dilation, self.groups)
|
| 213 |
+
|
| 214 |
+
|
| 215 |
+
def create_conv3d_pad(in_chs, out_chs, kernel_size, **kwargs):
|
| 216 |
+
padding = kwargs.pop("padding", "")
|
| 217 |
+
kwargs.setdefault("bias", False)
|
| 218 |
+
padding, is_dynamic = get_padding_value(padding, kernel_size, **kwargs)
|
| 219 |
+
if is_dynamic:
|
| 220 |
+
return Conv3dSame(in_chs, out_chs, kernel_size, **kwargs)
|
| 221 |
+
else:
|
| 222 |
+
return nn.Conv3d(in_chs, out_chs, kernel_size, padding=padding, **kwargs)
|
| 223 |
+
|
| 224 |
+
|
| 225 |
+
# Calculate symmetric padding for a convolution
|
| 226 |
+
def get_padding(kernel_size: int, stride: int = 1, dilation: int = 1, **_) -> int:
|
| 227 |
+
padding = ((stride - 1) + dilation * (kernel_size - 1)) // 2
|
| 228 |
+
return padding
|
| 229 |
+
|
| 230 |
+
|
| 231 |
+
# Calculate asymmetric TensorFlow-like 'SAME' padding for a convolution
|
| 232 |
+
def get_same_padding(x: int, k: int, s: int, d: int):
|
| 233 |
+
return max((math.ceil(x / s) - 1) * s + (k - 1) * d + 1 - x, 0)
|
| 234 |
+
|
| 235 |
+
|
| 236 |
+
# Can SAME padding for given args be done statically?
|
| 237 |
+
def is_static_pad(kernel_size: int, stride: int = 1, dilation: int = 1, **_):
|
| 238 |
+
return stride == 1 and (dilation * (kernel_size - 1)) % 2 == 0
|
| 239 |
+
|
| 240 |
+
|
| 241 |
+
# Dynamically pad input x with 'SAME' padding for conv with specified args
|
| 242 |
+
def pad_same(x, k: List[int], s: List[int], d: List[int] = (1, 1, 1), value: float = 0):
|
| 243 |
+
id, ih, iw = x.size()[-3:]
|
| 244 |
+
pad_d, pad_h, pad_w = (
|
| 245 |
+
get_same_padding(id, k[0], s[0], d[0]),
|
| 246 |
+
get_same_padding(ih, k[1], s[1], d[1]),
|
| 247 |
+
get_same_padding(iw, k[2], s[2], d[2]),
|
| 248 |
+
)
|
| 249 |
+
if pad_d > 0 or pad_h > 0 or pad_w > 0:
|
| 250 |
+
x = F.pad(
|
| 251 |
+
x,
|
| 252 |
+
[pad_d // 2, pad_d - pad_d // 2, pad_w // 2, pad_w - pad_w // 2, pad_h // 2, pad_h - pad_h // 2],
|
| 253 |
+
value=value,
|
| 254 |
+
)
|
| 255 |
+
return x
|
| 256 |
+
|
| 257 |
+
|
| 258 |
+
def get_padding_value(padding, kernel_size, **kwargs) -> Tuple[Tuple, bool]:
|
| 259 |
+
dynamic = False
|
| 260 |
+
if isinstance(padding, str):
|
| 261 |
+
# for any string padding, the padding will be calculated for you, one of three ways
|
| 262 |
+
padding = padding.lower()
|
| 263 |
+
if padding == "same":
|
| 264 |
+
# TF compatible 'SAME' padding, has a performance and GPU memory allocation impact
|
| 265 |
+
if is_static_pad(kernel_size, **kwargs):
|
| 266 |
+
# static case, no extra overhead
|
| 267 |
+
padding = get_padding(kernel_size, **kwargs)
|
| 268 |
+
else:
|
| 269 |
+
# dynamic 'SAME' padding, has runtime/GPU memory overhead
|
| 270 |
+
padding = 0
|
| 271 |
+
dynamic = True
|
| 272 |
+
elif padding == "valid":
|
| 273 |
+
# 'VALID' padding, same as padding=0
|
| 274 |
+
padding = 0
|
| 275 |
+
else:
|
| 276 |
+
# Default to PyTorch style 'same'-ish symmetric padding
|
| 277 |
+
padding = get_padding(kernel_size, **kwargs)
|
| 278 |
+
return padding, dynamic
|
| 279 |
+
|
| 280 |
+
|
| 281 |
+
# From PyTorch internals
|
| 282 |
+
def _ntuple(n):
|
| 283 |
+
def parse(x):
|
| 284 |
+
if isinstance(x, collections.abc.Iterable):
|
| 285 |
+
return x
|
| 286 |
+
return tuple(repeat(x, n))
|
| 287 |
+
|
| 288 |
+
return parse
|
| 289 |
+
|
| 290 |
+
|
| 291 |
+
to_1tuple = _ntuple(1)
|
| 292 |
+
to_2tuple = _ntuple(2)
|
| 293 |
+
to_3tuple = _ntuple(3)
|
| 294 |
+
to_4tuple = _ntuple(4)
|
| 295 |
+
to_ntuple = _ntuple
|
| 296 |
+
|
| 297 |
+
|
| 298 |
+
def make_divisible(v, divisor=8, min_value=None, round_limit=0.9):
|
| 299 |
+
min_value = min_value or divisor
|
| 300 |
+
new_v = max(min_value, int(v + divisor / 2) // divisor * divisor)
|
| 301 |
+
# Make sure that round down does not go down by more than 10%.
|
| 302 |
+
if new_v < round_limit * v:
|
| 303 |
+
new_v += divisor
|
| 304 |
+
return new_v
|
| 305 |
+
|
| 306 |
+
|
| 307 |
+
class Linear(nn.Linear):
|
| 308 |
+
r"""Applies a linear transformation to the incoming data: :math:`y = xA^T + b`
|
| 309 |
+
|
| 310 |
+
Wraps torch.nn.Linear to support AMP + torchscript usage by manually casting
|
| 311 |
+
weight & bias to input.dtype to work around an issue w/ torch.addmm in this use case.
|
| 312 |
+
"""
|
| 313 |
+
|
| 314 |
+
def forward(self, input: torch.Tensor) -> torch.Tensor:
|
| 315 |
+
if torch.jit.is_scripting():
|
| 316 |
+
bias = self.bias.to(dtype=input.dtype) if self.bias is not None else None
|
| 317 |
+
return F.linear(input, self.weight.to(dtype=input.dtype), bias=bias)
|
| 318 |
+
else:
|
| 319 |
+
return F.linear(input, self.weight, self.bias)
|
| 320 |
+
|
| 321 |
+
|
| 322 |
+
class Mlp(nn.Module):
|
| 323 |
+
"""MLP as used in Vision Transformer, MLP-Mixer and related networks"""
|
| 324 |
+
|
| 325 |
+
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.0):
|
| 326 |
+
super().__init__()
|
| 327 |
+
out_features = out_features or in_features
|
| 328 |
+
hidden_features = hidden_features or in_features
|
| 329 |
+
drop_probs = to_2tuple(drop)
|
| 330 |
+
|
| 331 |
+
self.fc1 = nn.Linear(in_features, hidden_features)
|
| 332 |
+
self.act = act_layer()
|
| 333 |
+
self.drop1 = nn.Dropout(drop_probs[0])
|
| 334 |
+
self.fc2 = nn.Linear(hidden_features, out_features)
|
| 335 |
+
self.drop2 = nn.Dropout(drop_probs[1])
|
| 336 |
+
|
| 337 |
+
def forward(self, x):
|
| 338 |
+
x = self.fc1(x)
|
| 339 |
+
x = self.act(x)
|
| 340 |
+
x = self.drop1(x)
|
| 341 |
+
x = self.fc2(x)
|
| 342 |
+
x = self.drop2(x)
|
| 343 |
+
return x
|
| 344 |
+
|
| 345 |
+
|
| 346 |
+
def avg_pool3d_same(
|
| 347 |
+
x,
|
| 348 |
+
kernel_size: List[int],
|
| 349 |
+
stride: List[int],
|
| 350 |
+
padding: List[int] = (0, 0, 0),
|
| 351 |
+
ceil_mode: bool = False,
|
| 352 |
+
count_include_pad: bool = True,
|
| 353 |
+
):
|
| 354 |
+
# FIXME how to deal with count_include_pad vs not for external padding?
|
| 355 |
+
x = pad_same(x, kernel_size, stride)
|
| 356 |
+
return F.avg_pool3d(x, kernel_size, stride, (0, 0, 0), ceil_mode, count_include_pad)
|
| 357 |
+
|
| 358 |
+
|
| 359 |
+
class AvgPool3dSame(nn.AvgPool2d):
|
| 360 |
+
"""Tensorflow like 'SAME' wrapper for 2D average pooling"""
|
| 361 |
+
|
| 362 |
+
def __init__(self, kernel_size: int, stride=None, padding=0, ceil_mode=False, count_include_pad=True):
|
| 363 |
+
kernel_size = to_2tuple(kernel_size)
|
| 364 |
+
stride = to_2tuple(stride)
|
| 365 |
+
super(AvgPool3dSame, self).__init__(kernel_size, stride, (0, 0, 0), ceil_mode, count_include_pad)
|
| 366 |
+
|
| 367 |
+
def forward(self, x):
|
| 368 |
+
x = pad_same(x, self.kernel_size, self.stride)
|
| 369 |
+
return F.avg_pool3d(x, self.kernel_size, self.stride, self.padding, self.ceil_mode, self.count_include_pad)
|
| 370 |
+
|
| 371 |
+
|
| 372 |
+
def max_pool3d_same(
|
| 373 |
+
x,
|
| 374 |
+
kernel_size: List[int],
|
| 375 |
+
stride: List[int],
|
| 376 |
+
padding: List[int] = (0, 0, 0),
|
| 377 |
+
dilation: List[int] = (1, 1, 1),
|
| 378 |
+
ceil_mode: bool = False,
|
| 379 |
+
):
|
| 380 |
+
x = pad_same(x, kernel_size, stride, value=-float("inf"))
|
| 381 |
+
return F.max_pool3d(x, kernel_size, stride, (0, 0, 0), dilation, ceil_mode)
|
| 382 |
+
|
| 383 |
+
|
| 384 |
+
class MaxPool3dSame(nn.MaxPool2d):
|
| 385 |
+
"""Tensorflow like 'SAME' wrapper for 3D max pooling"""
|
| 386 |
+
|
| 387 |
+
def __init__(self, kernel_size: int, stride=None, padding=0, dilation=1, ceil_mode=False):
|
| 388 |
+
kernel_size = to_2tuple(kernel_size)
|
| 389 |
+
stride = to_2tuple(stride)
|
| 390 |
+
dilation = to_2tuple(dilation)
|
| 391 |
+
super(MaxPool3dSame, self).__init__(kernel_size, stride, (0, 0, 0), dilation, ceil_mode)
|
| 392 |
+
|
| 393 |
+
def forward(self, x):
|
| 394 |
+
x = pad_same(x, self.kernel_size, self.stride, value=-float("inf"))
|
| 395 |
+
return F.max_pool3d(x, self.kernel_size, self.stride, (0, 0, 0), self.dilation, self.ceil_mode)
|
| 396 |
+
|
| 397 |
+
|
| 398 |
+
def create_pool3d(pool_type, kernel_size, stride=None, **kwargs):
|
| 399 |
+
stride = stride or kernel_size
|
| 400 |
+
padding = kwargs.pop("padding", "")
|
| 401 |
+
padding, is_dynamic = get_padding_value(padding, kernel_size, stride=stride, **kwargs)
|
| 402 |
+
if is_dynamic:
|
| 403 |
+
if pool_type == "avg":
|
| 404 |
+
return AvgPool3dSame(kernel_size, stride=stride, **kwargs)
|
| 405 |
+
elif pool_type == "max":
|
| 406 |
+
return MaxPool3dSame(kernel_size, stride=stride, **kwargs)
|
| 407 |
+
else:
|
| 408 |
+
raise AssertionError()
|
| 409 |
+
|
| 410 |
+
# assert False, f"Unsupported pool type {pool_type}"
|
| 411 |
+
else:
|
| 412 |
+
if pool_type == "avg":
|
| 413 |
+
return nn.AvgPool3d(kernel_size, stride=stride, padding=padding, **kwargs)
|
| 414 |
+
elif pool_type == "max":
|
| 415 |
+
return nn.MaxPool3d(kernel_size, stride=stride, padding=padding, **kwargs)
|
| 416 |
+
else:
|
| 417 |
+
raise AssertionError()
|
| 418 |
+
|
| 419 |
+
# assert False, f"Unsupported pool type {pool_type}"
|
| 420 |
+
|
| 421 |
+
|
| 422 |
+
def _float_to_int(x: float) -> int:
|
| 423 |
+
"""
|
| 424 |
+
Symbolic tracing helper to substitute for inbuilt `int`.
|
| 425 |
+
Hint: Inbuilt `int` can't accept an argument of type `Proxy`
|
| 426 |
+
"""
|
| 427 |
+
return int(x)
|
| 428 |
+
|
| 429 |
+
|
| 430 |
+
def _no_grad_trunc_normal_(tensor, mean, std, a, b):
|
| 431 |
+
# Cut & paste from PyTorch official master until it's in a few official releases - RW
|
| 432 |
+
# Method based on https://people.sc.fsu.edu/~jburkardt/presentations/truncated_normal.pdf
|
| 433 |
+
def norm_cdf(x):
|
| 434 |
+
# Computes standard normal cumulative distribution function
|
| 435 |
+
return (1.0 + math.erf(x / math.sqrt(2.0))) / 2.0
|
| 436 |
+
|
| 437 |
+
if (mean < a - 2 * std) or (mean > b + 2 * std):
|
| 438 |
+
warnings.warn(
|
| 439 |
+
"mean is more than 2 std from [a, b] in nn.init.trunc_normal_. "
|
| 440 |
+
"The distribution of values may be incorrect.",
|
| 441 |
+
stacklevel=2,
|
| 442 |
+
)
|
| 443 |
+
|
| 444 |
+
with torch.no_grad():
|
| 445 |
+
# Values are generated by using a truncated uniform distribution and
|
| 446 |
+
# then using the inverse CDF for the normal distribution.
|
| 447 |
+
# Get upper and lower cdf values
|
| 448 |
+
l = norm_cdf((a - mean) / std)
|
| 449 |
+
u = norm_cdf((b - mean) / std)
|
| 450 |
+
|
| 451 |
+
# Uniformly fill tensor with values from [l, u], then translate to
|
| 452 |
+
# [2l-1, 2u-1].
|
| 453 |
+
tensor.uniform_(2 * l - 1, 2 * u - 1)
|
| 454 |
+
|
| 455 |
+
# Use inverse cdf transform for normal distribution to get truncated
|
| 456 |
+
# standard normal
|
| 457 |
+
tensor.erfinv_()
|
| 458 |
+
|
| 459 |
+
# Transform to proper mean, std
|
| 460 |
+
tensor.mul_(std * math.sqrt(2.0))
|
| 461 |
+
tensor.add_(mean)
|
| 462 |
+
|
| 463 |
+
# Clamp to ensure it's in the proper range
|
| 464 |
+
tensor.clamp_(min=a, max=b)
|
| 465 |
+
return tensor
|
| 466 |
+
|
| 467 |
+
|
| 468 |
+
def trunc_normal_(tensor, mean=0.0, std=1.0, a=-2.0, b=2.0):
|
| 469 |
+
r"""Fills the input Tensor with values drawn from a truncated
|
| 470 |
+
normal distribution. The values are effectively drawn from the
|
| 471 |
+
normal distribution :math:`\mathcal{N}(\text{mean}, \text{std}^2)`
|
| 472 |
+
with values outside :math:`[a, b]` redrawn until they are within
|
| 473 |
+
the bounds. The method used for generating the random values works
|
| 474 |
+
best when :math:`a \leq \text{mean} \leq b`.
|
| 475 |
+
Args:
|
| 476 |
+
tensor: an n-dimensional `torch.Tensor`
|
| 477 |
+
mean: the mean of the normal distribution
|
| 478 |
+
std: the standard deviation of the normal distribution
|
| 479 |
+
a: the minimum cutoff value
|
| 480 |
+
b: the maximum cutoff value
|
| 481 |
+
Examples:
|
| 482 |
+
>>> w = torch.empty(3, 5)
|
| 483 |
+
>>> nn.init.trunc_normal_(w)
|
| 484 |
+
"""
|
| 485 |
+
return _no_grad_trunc_normal_(tensor, mean, std, a, b)
|
scripts/networks/nest_transformer_3D.py
ADDED
|
@@ -0,0 +1,489 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
#!/usr/bin/env python3
|
| 2 |
+
|
| 3 |
+
# =========================================================================
|
| 4 |
+
# Adapted from https://github.com/google-research/nested-transformer.
|
| 5 |
+
# which has the following license...
|
| 6 |
+
# https://github.com/pytorch/vision/blob/main/LICENSE
|
| 7 |
+
#
|
| 8 |
+
# BSD 3-Clause License
|
| 9 |
+
|
| 10 |
+
|
| 11 |
+
# Redistribution and use in source and binary forms, with or without
|
| 12 |
+
# modification, are permitted provided that the following conditions are met:
|
| 13 |
+
|
| 14 |
+
# * Redistributions of source code must retain the above copyright notice, this
|
| 15 |
+
# list of conditions and the following disclaimer.
|
| 16 |
+
|
| 17 |
+
# * Redistributions in binary form must reproduce the above copyright notice,
|
| 18 |
+
# this list of conditions and the following disclaimer in the documentation
|
| 19 |
+
# and/or other materials provided with the distribution.
|
| 20 |
+
|
| 21 |
+
# * Neither the name of the copyright holder nor the names of its
|
| 22 |
+
# contributors may be used to endorse or promote products derived from
|
| 23 |
+
# this software without specific prior written permission.
|
| 24 |
+
|
| 25 |
+
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
|
| 26 |
+
# AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
|
| 27 |
+
# IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
|
| 28 |
+
# DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
|
| 29 |
+
# FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
|
| 30 |
+
# DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
|
| 31 |
+
# SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
|
| 32 |
+
# CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
|
| 33 |
+
# OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
|
| 34 |
+
# OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
|
| 35 |
+
|
| 36 |
+
""" Nested Transformer (NesT) in PyTorch
|
| 37 |
+
A PyTorch implement of Aggregating Nested Transformers as described in:
|
| 38 |
+
'Aggregating Nested Transformers'
|
| 39 |
+
- https://arxiv.org/abs/2105.12723
|
| 40 |
+
The official Jax code is released and available at https://github.com/google-research/nested-transformer.
|
| 41 |
+
The weights have been converted with convert/convert_nest_flax.py
|
| 42 |
+
Acknowledgments:
|
| 43 |
+
* The paper authors for sharing their research, code, and model weights
|
| 44 |
+
* Ross Wightman's existing code off which I based this
|
| 45 |
+
Copyright 2021 Alexander Soare
|
| 46 |
+
|
| 47 |
+
"""
|
| 48 |
+
|
| 49 |
+
import collections.abc
|
| 50 |
+
import logging
|
| 51 |
+
import math
|
| 52 |
+
from functools import partial
|
| 53 |
+
from typing import Callable, Sequence
|
| 54 |
+
|
| 55 |
+
import torch
|
| 56 |
+
import torch.nn.functional as F
|
| 57 |
+
from torch import nn
|
| 58 |
+
|
| 59 |
+
from .nest import DropPath, Mlp, _assert, create_conv3d, create_pool3d, to_ntuple, trunc_normal_
|
| 60 |
+
from .patchEmbed3D import PatchEmbed3D
|
| 61 |
+
|
| 62 |
+
_logger = logging.getLogger(__name__)
|
| 63 |
+
|
| 64 |
+
|
| 65 |
+
class Attention(nn.Module):
|
| 66 |
+
"""
|
| 67 |
+
This is much like `.vision_transformer.Attention` but uses *localised* self attention by accepting an input with
|
| 68 |
+
an extra "image block" dim
|
| 69 |
+
"""
|
| 70 |
+
|
| 71 |
+
def __init__(self, dim, num_heads=8, qkv_bias=False, attn_drop=0.0, proj_drop=0.0):
|
| 72 |
+
super().__init__()
|
| 73 |
+
self.num_heads = num_heads
|
| 74 |
+
head_dim = dim // num_heads
|
| 75 |
+
self.scale = head_dim**-0.5
|
| 76 |
+
|
| 77 |
+
self.qkv = nn.Linear(dim, 3 * dim, bias=qkv_bias)
|
| 78 |
+
self.attn_drop = nn.Dropout(attn_drop)
|
| 79 |
+
self.proj = nn.Linear(dim, dim)
|
| 80 |
+
self.proj_drop = nn.Dropout(proj_drop)
|
| 81 |
+
|
| 82 |
+
def forward(self, x):
|
| 83 |
+
"""
|
| 84 |
+
x is shape: B (batch_size), T (image blocks), N (seq length per image block), C (embed dim)
|
| 85 |
+
"""
|
| 86 |
+
b, t, n, c = x.shape
|
| 87 |
+
# result of next line is (qkv, B, num (H)eads, T, N, (C')hannels per head)
|
| 88 |
+
qkv = self.qkv(x).reshape(b, t, n, 3, self.num_heads, c // self.num_heads).permute(3, 0, 4, 1, 2, 5)
|
| 89 |
+
q, k, v = qkv.unbind(0) # make torchscript happy (cannot use tensor as tuple)
|
| 90 |
+
|
| 91 |
+
attn = (q @ k.transpose(-2, -1)) * self.scale # (B, H, T, N, N)
|
| 92 |
+
attn = attn.softmax(dim=-1)
|
| 93 |
+
attn = self.attn_drop(attn)
|
| 94 |
+
|
| 95 |
+
x = (attn @ v).permute(0, 2, 3, 4, 1).reshape(b, t, n, c)
|
| 96 |
+
x = self.proj(x)
|
| 97 |
+
x = self.proj_drop(x)
|
| 98 |
+
return x # (B, T, N, C)
|
| 99 |
+
|
| 100 |
+
|
| 101 |
+
class TransformerLayer(nn.Module):
|
| 102 |
+
"""
|
| 103 |
+
This is much like `.vision_transformer.Block` but:
|
| 104 |
+
- Called TransformerLayer here to allow for "block" as defined in the paper ("non-overlapping image blocks")
|
| 105 |
+
- Uses modified Attention layer that handles the "block" dimension
|
| 106 |
+
"""
|
| 107 |
+
|
| 108 |
+
def __init__(
|
| 109 |
+
self,
|
| 110 |
+
dim,
|
| 111 |
+
num_heads,
|
| 112 |
+
mlp_ratio=4.0,
|
| 113 |
+
qkv_bias=False,
|
| 114 |
+
drop=0.0,
|
| 115 |
+
attn_drop=0.0,
|
| 116 |
+
drop_path=0.0,
|
| 117 |
+
act_layer=nn.GELU,
|
| 118 |
+
norm_layer=nn.LayerNorm,
|
| 119 |
+
):
|
| 120 |
+
super().__init__()
|
| 121 |
+
self.norm1 = norm_layer(dim)
|
| 122 |
+
self.attn = Attention(dim, num_heads=num_heads, qkv_bias=qkv_bias, attn_drop=attn_drop, proj_drop=drop)
|
| 123 |
+
self.drop_path = DropPath(drop_path) if drop_path > 0.0 else nn.Identity()
|
| 124 |
+
self.norm2 = norm_layer(dim)
|
| 125 |
+
mlp_hidden_dim = int(dim * mlp_ratio)
|
| 126 |
+
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
|
| 127 |
+
|
| 128 |
+
def forward(self, x):
|
| 129 |
+
y = self.norm1(x)
|
| 130 |
+
x = x + self.drop_path(self.attn(y))
|
| 131 |
+
x = x + self.drop_path(self.mlp(self.norm2(x)))
|
| 132 |
+
return x
|
| 133 |
+
|
| 134 |
+
|
| 135 |
+
class ConvPool(nn.Module):
|
| 136 |
+
def __init__(self, in_channels, out_channels, norm_layer, pad_type=""):
|
| 137 |
+
super().__init__()
|
| 138 |
+
self.conv = create_conv3d(in_channels, out_channels, kernel_size=3, padding=pad_type, bias=True)
|
| 139 |
+
self.norm = norm_layer(out_channels)
|
| 140 |
+
self.pool = create_pool3d("max", kernel_size=3, stride=2, padding=pad_type)
|
| 141 |
+
|
| 142 |
+
def forward(self, x):
|
| 143 |
+
"""
|
| 144 |
+
x is expected to have shape (B, C, D, H, W)
|
| 145 |
+
"""
|
| 146 |
+
_assert(x.shape[-3] % 2 == 0, "BlockAggregation requires even input spatial dims")
|
| 147 |
+
_assert(x.shape[-2] % 2 == 0, "BlockAggregation requires even input spatial dims")
|
| 148 |
+
_assert(x.shape[-1] % 2 == 0, "BlockAggregation requires even input spatial dims")
|
| 149 |
+
|
| 150 |
+
# print('In ConvPool x : {}'.format(x.shape))
|
| 151 |
+
x = self.conv(x)
|
| 152 |
+
# Layer norm done over channel dim only
|
| 153 |
+
x = self.norm(x.permute(0, 2, 3, 4, 1)).permute(0, 4, 1, 2, 3)
|
| 154 |
+
x = self.pool(x)
|
| 155 |
+
return x # (B, C, D//2, H//2, W//2)
|
| 156 |
+
|
| 157 |
+
|
| 158 |
+
def blockify(x, block_size: int):
|
| 159 |
+
"""image to blocks
|
| 160 |
+
Args:
|
| 161 |
+
x (Tensor): with shape (B, D, H, W, C)
|
| 162 |
+
block_size (int): edge length of a single square block in units of D, H, W
|
| 163 |
+
"""
|
| 164 |
+
b, d, h, w, c = x.shape
|
| 165 |
+
_assert(d % block_size == 0, "`block_size` must divide input depth evenly")
|
| 166 |
+
_assert(h % block_size == 0, "`block_size` must divide input height evenly")
|
| 167 |
+
_assert(w % block_size == 0, "`block_size` must divide input width evenly")
|
| 168 |
+
grid_depth = d // block_size
|
| 169 |
+
grid_height = h // block_size
|
| 170 |
+
grid_width = w // block_size
|
| 171 |
+
x = x.reshape(b, grid_depth, block_size, grid_height, block_size, grid_width, block_size, c)
|
| 172 |
+
|
| 173 |
+
x = x.permute(0, 1, 3, 5, 2, 4, 6, 7).reshape(
|
| 174 |
+
b, grid_depth * grid_height * grid_width, -1, c
|
| 175 |
+
) # shape [2, 512, 27, 128]
|
| 176 |
+
|
| 177 |
+
return x # (B, T, N, C)
|
| 178 |
+
|
| 179 |
+
|
| 180 |
+
# @register_notrace_function # reason: int receives Proxy
|
| 181 |
+
def deblockify(x, block_size: int):
|
| 182 |
+
"""blocks to image
|
| 183 |
+
Args:
|
| 184 |
+
x (Tensor): with shape (B, T, N, C) where T is number of blocks and N is sequence size per block
|
| 185 |
+
block_size (int): edge length of a single square block in units of desired D, H, W
|
| 186 |
+
"""
|
| 187 |
+
b, t, _, c = x.shape
|
| 188 |
+
grid_size = round(math.pow(t, 1 / 3))
|
| 189 |
+
depth = height = width = grid_size * block_size
|
| 190 |
+
x = x.reshape(b, grid_size, grid_size, grid_size, block_size, block_size, block_size, c)
|
| 191 |
+
|
| 192 |
+
x = x.permute(0, 1, 4, 2, 5, 3, 6, 7).reshape(b, depth, height, width, c)
|
| 193 |
+
|
| 194 |
+
return x # (B, D, H, W, C)
|
| 195 |
+
|
| 196 |
+
|
| 197 |
+
class NestLevel(nn.Module):
|
| 198 |
+
"""Single hierarchical level of a Nested Transformer"""
|
| 199 |
+
|
| 200 |
+
def __init__(
|
| 201 |
+
self,
|
| 202 |
+
num_blocks,
|
| 203 |
+
block_size,
|
| 204 |
+
seq_length,
|
| 205 |
+
num_heads,
|
| 206 |
+
depth,
|
| 207 |
+
embed_dim,
|
| 208 |
+
prev_embed_dim=None,
|
| 209 |
+
mlp_ratio=4.0,
|
| 210 |
+
qkv_bias=True,
|
| 211 |
+
drop_rate=0.0,
|
| 212 |
+
attn_drop_rate=0.0,
|
| 213 |
+
drop_path_rates: Sequence[int] = (),
|
| 214 |
+
norm_layer=None,
|
| 215 |
+
act_layer=None,
|
| 216 |
+
pad_type="",
|
| 217 |
+
):
|
| 218 |
+
super().__init__()
|
| 219 |
+
self.block_size = block_size
|
| 220 |
+
self.pos_embed = nn.Parameter(torch.zeros(1, num_blocks, seq_length, embed_dim))
|
| 221 |
+
|
| 222 |
+
if prev_embed_dim is not None:
|
| 223 |
+
self.pool = ConvPool(prev_embed_dim, embed_dim, norm_layer=norm_layer, pad_type=pad_type)
|
| 224 |
+
else:
|
| 225 |
+
self.pool = nn.Identity()
|
| 226 |
+
|
| 227 |
+
# Transformer encoder
|
| 228 |
+
if len(drop_path_rates):
|
| 229 |
+
assert len(drop_path_rates) == depth, "Must provide as many drop path rates as there are transformer layers"
|
| 230 |
+
self.transformer_encoder = nn.Sequential(
|
| 231 |
+
*[
|
| 232 |
+
TransformerLayer(
|
| 233 |
+
dim=embed_dim,
|
| 234 |
+
num_heads=num_heads,
|
| 235 |
+
mlp_ratio=mlp_ratio,
|
| 236 |
+
qkv_bias=qkv_bias,
|
| 237 |
+
drop=drop_rate,
|
| 238 |
+
attn_drop=attn_drop_rate,
|
| 239 |
+
drop_path=drop_path_rates[i],
|
| 240 |
+
norm_layer=norm_layer,
|
| 241 |
+
act_layer=act_layer,
|
| 242 |
+
)
|
| 243 |
+
for i in range(depth)
|
| 244 |
+
]
|
| 245 |
+
)
|
| 246 |
+
|
| 247 |
+
def forward(self, x):
|
| 248 |
+
"""
|
| 249 |
+
expects x as (B, C, D, H, W)
|
| 250 |
+
"""
|
| 251 |
+
x = self.pool(x)
|
| 252 |
+
x = x.permute(0, 2, 3, 4, 1) # (B, H', W', C), switch to channels last for transformer
|
| 253 |
+
|
| 254 |
+
x = blockify(x, self.block_size) # (B, T, N, C')
|
| 255 |
+
x = x + self.pos_embed
|
| 256 |
+
|
| 257 |
+
x = self.transformer_encoder(x) # (B, ,T, N, C')
|
| 258 |
+
|
| 259 |
+
x = deblockify(x, self.block_size) # (B, D', H', W', C') [2, 24, 24, 24, 128]
|
| 260 |
+
# Channel-first for block aggregation, and generally to replicate convnet feature map at each stage
|
| 261 |
+
return x.permute(0, 4, 1, 2, 3) # (B, C, D', H', W')
|
| 262 |
+
|
| 263 |
+
|
| 264 |
+
class NestTransformer3D(nn.Module):
|
| 265 |
+
"""Nested Transformer (NesT)
|
| 266 |
+
A PyTorch impl of : `Aggregating Nested Transformers`
|
| 267 |
+
- https://arxiv.org/abs/2105.12723
|
| 268 |
+
"""
|
| 269 |
+
|
| 270 |
+
def __init__(
|
| 271 |
+
self,
|
| 272 |
+
img_size=96,
|
| 273 |
+
in_chans=1,
|
| 274 |
+
patch_size=2,
|
| 275 |
+
num_levels=3,
|
| 276 |
+
embed_dims=(128, 256, 512),
|
| 277 |
+
num_heads=(4, 8, 16),
|
| 278 |
+
depths=(2, 2, 20),
|
| 279 |
+
num_classes=1000,
|
| 280 |
+
mlp_ratio=4.0,
|
| 281 |
+
qkv_bias=True,
|
| 282 |
+
drop_rate=0.0,
|
| 283 |
+
attn_drop_rate=0.0,
|
| 284 |
+
drop_path_rate=0.5,
|
| 285 |
+
norm_layer=None,
|
| 286 |
+
act_layer=None,
|
| 287 |
+
pad_type="",
|
| 288 |
+
weight_init="",
|
| 289 |
+
global_pool="avg",
|
| 290 |
+
):
|
| 291 |
+
"""
|
| 292 |
+
Args:
|
| 293 |
+
img_size (int, tuple): input image size
|
| 294 |
+
in_chans (int): number of input channels
|
| 295 |
+
patch_size (int): patch size
|
| 296 |
+
num_levels (int): number of block hierarchies (T_d in the paper)
|
| 297 |
+
embed_dims (int, tuple): embedding dimensions of each level
|
| 298 |
+
num_heads (int, tuple): number of attention heads for each level
|
| 299 |
+
depths (int, tuple): number of transformer layers for each level
|
| 300 |
+
num_classes (int): number of classes for classification head
|
| 301 |
+
mlp_ratio (int): ratio of mlp hidden dim to embedding dim for MLP of transformer layers
|
| 302 |
+
qkv_bias (bool): enable bias for qkv if True
|
| 303 |
+
drop_rate (float): dropout rate for MLP of transformer layers, MSA final projection layer, and classifier
|
| 304 |
+
attn_drop_rate (float): attention dropout rate
|
| 305 |
+
drop_path_rate (float): stochastic depth rate
|
| 306 |
+
norm_layer: (nn.Module): normalization layer for transformer layers
|
| 307 |
+
act_layer: (nn.Module): activation layer in MLP of transformer layers
|
| 308 |
+
pad_type: str: Type of padding to use '' for PyTorch symmetric, 'same' for TF SAME
|
| 309 |
+
weight_init: (str): weight init scheme
|
| 310 |
+
global_pool: (str): type of pooling operation to apply to final feature map
|
| 311 |
+
Notes:
|
| 312 |
+
- Default values follow NesT-B from the original Jax code.
|
| 313 |
+
- `embed_dims`, `num_heads`, `depths` should be ints or tuples with length `num_levels`.
|
| 314 |
+
- For those following the paper, Table A1 may have errors!
|
| 315 |
+
- https://github.com/google-research/nested-transformer/issues/2
|
| 316 |
+
"""
|
| 317 |
+
super().__init__()
|
| 318 |
+
|
| 319 |
+
for param_name in ["embed_dims", "num_heads", "depths"]:
|
| 320 |
+
param_value = locals()[param_name]
|
| 321 |
+
if isinstance(param_value, collections.abc.Sequence):
|
| 322 |
+
assert len(param_value) == num_levels, f"Require `len({param_name}) == num_levels`"
|
| 323 |
+
|
| 324 |
+
embed_dims = to_ntuple(num_levels)(embed_dims)
|
| 325 |
+
num_heads = to_ntuple(num_levels)(num_heads)
|
| 326 |
+
depths = to_ntuple(num_levels)(depths)
|
| 327 |
+
self.num_classes = num_classes
|
| 328 |
+
self.num_features = embed_dims[-1]
|
| 329 |
+
self.feature_info = []
|
| 330 |
+
norm_layer = norm_layer or partial(nn.LayerNorm, eps=1e-6)
|
| 331 |
+
act_layer = act_layer or nn.GELU
|
| 332 |
+
self.drop_rate = drop_rate
|
| 333 |
+
self.num_levels = num_levels
|
| 334 |
+
if isinstance(img_size, collections.abc.Sequence):
|
| 335 |
+
assert img_size[0] == img_size[1], "Model only handles square inputs"
|
| 336 |
+
img_size = img_size[0]
|
| 337 |
+
assert img_size % patch_size == 0, "`patch_size` must divide `img_size` evenly"
|
| 338 |
+
self.patch_size = patch_size
|
| 339 |
+
|
| 340 |
+
# Number of blocks at each level
|
| 341 |
+
self.num_blocks = (8 ** torch.arange(num_levels)).flip(0).tolist()
|
| 342 |
+
assert (img_size // patch_size) % round(
|
| 343 |
+
math.pow(self.num_blocks[0], 1 / 3)
|
| 344 |
+
) == 0, "First level blocks don't fit evenly. Check `img_size`, `patch_size`, and `num_levels`"
|
| 345 |
+
|
| 346 |
+
# Block edge size in units of patches
|
| 347 |
+
# Hint: (img_size // patch_size) gives number of patches along edge of image. sqrt(self.num_blocks[0]) is the
|
| 348 |
+
# number of blocks along edge of image
|
| 349 |
+
self.block_size = int((img_size // patch_size) // round(math.pow(self.num_blocks[0], 1 / 3)))
|
| 350 |
+
|
| 351 |
+
# Patch embedding
|
| 352 |
+
self.patch_embed = PatchEmbed3D(
|
| 353 |
+
img_size=[img_size, img_size, img_size],
|
| 354 |
+
patch_size=[patch_size, patch_size, patch_size],
|
| 355 |
+
in_chans=in_chans,
|
| 356 |
+
embed_dim=embed_dims[0],
|
| 357 |
+
)
|
| 358 |
+
self.num_patches = self.patch_embed.num_patches
|
| 359 |
+
self.seq_length = self.num_patches // self.num_blocks[0]
|
| 360 |
+
# Build up each hierarchical level
|
| 361 |
+
levels = []
|
| 362 |
+
|
| 363 |
+
dp_rates = [x.tolist() for x in torch.linspace(0, drop_path_rate, sum(depths)).split(depths)]
|
| 364 |
+
prev_dim = None
|
| 365 |
+
curr_stride = 4
|
| 366 |
+
for i in range(len(self.num_blocks)):
|
| 367 |
+
dim = embed_dims[i]
|
| 368 |
+
levels.append(
|
| 369 |
+
NestLevel(
|
| 370 |
+
self.num_blocks[i],
|
| 371 |
+
self.block_size,
|
| 372 |
+
self.seq_length,
|
| 373 |
+
num_heads[i],
|
| 374 |
+
depths[i],
|
| 375 |
+
dim,
|
| 376 |
+
prev_dim,
|
| 377 |
+
mlp_ratio,
|
| 378 |
+
qkv_bias,
|
| 379 |
+
drop_rate,
|
| 380 |
+
attn_drop_rate,
|
| 381 |
+
dp_rates[i],
|
| 382 |
+
norm_layer,
|
| 383 |
+
act_layer,
|
| 384 |
+
pad_type=pad_type,
|
| 385 |
+
)
|
| 386 |
+
)
|
| 387 |
+
self.feature_info += [dict(num_chs=dim, reduction=curr_stride, module=f"levels.{i}")]
|
| 388 |
+
prev_dim = dim
|
| 389 |
+
curr_stride *= 2
|
| 390 |
+
|
| 391 |
+
self.levels = nn.ModuleList([levels[i] for i in range(num_levels)])
|
| 392 |
+
|
| 393 |
+
# Final normalization layer
|
| 394 |
+
self.norm = norm_layer(embed_dims[-1])
|
| 395 |
+
|
| 396 |
+
self.init_weights(weight_init)
|
| 397 |
+
|
| 398 |
+
def init_weights(self, mode=""):
|
| 399 |
+
assert mode in ("nlhb", "")
|
| 400 |
+
head_bias = -math.log(self.num_classes) if "nlhb" in mode else 0.0
|
| 401 |
+
for level in self.levels:
|
| 402 |
+
trunc_normal_(level.pos_embed, std=0.02, a=-2, b=2)
|
| 403 |
+
named_apply(partial(_init_nest_weights, head_bias=head_bias), self)
|
| 404 |
+
|
| 405 |
+
@torch.jit.ignore
|
| 406 |
+
def no_weight_decay(self):
|
| 407 |
+
return {f"level.{i}.pos_embed" for i in range(len(self.levels))}
|
| 408 |
+
|
| 409 |
+
def get_classifier(self):
|
| 410 |
+
return self.head
|
| 411 |
+
|
| 412 |
+
def forward_features(self, x):
|
| 413 |
+
"""x shape (B, C, D, H, W)"""
|
| 414 |
+
x = self.patch_embed(x)
|
| 415 |
+
|
| 416 |
+
hidden_states_out = [x]
|
| 417 |
+
|
| 418 |
+
for _, level in enumerate(self.levels):
|
| 419 |
+
x = level(x)
|
| 420 |
+
hidden_states_out.append(x)
|
| 421 |
+
# Layer norm done over channel dim only (to NDHWC and back)
|
| 422 |
+
x = self.norm(x.permute(0, 2, 3, 4, 1)).permute(0, 4, 1, 2, 3)
|
| 423 |
+
return x, hidden_states_out
|
| 424 |
+
|
| 425 |
+
def forward(self, x):
|
| 426 |
+
"""x shape (B, C, D, H, W)"""
|
| 427 |
+
x = self.forward_features(x)
|
| 428 |
+
|
| 429 |
+
if self.drop_rate > 0.0:
|
| 430 |
+
x = F.dropout(x, p=self.drop_rate, training=self.training)
|
| 431 |
+
return x
|
| 432 |
+
|
| 433 |
+
|
| 434 |
+
def named_apply(fn: Callable, module: nn.Module, name="", depth_first=True, include_root=False) -> nn.Module:
|
| 435 |
+
if not depth_first and include_root:
|
| 436 |
+
fn(module=module, name=name)
|
| 437 |
+
for child_name, child_module in module.named_children():
|
| 438 |
+
child_name = ".".join((name, child_name)) if name else child_name
|
| 439 |
+
named_apply(fn=fn, module=child_module, name=child_name, depth_first=depth_first, include_root=True)
|
| 440 |
+
if depth_first and include_root:
|
| 441 |
+
fn(module=module, name=name)
|
| 442 |
+
return module
|
| 443 |
+
|
| 444 |
+
|
| 445 |
+
def _init_nest_weights(module: nn.Module, name: str = "", head_bias: float = 0.0):
|
| 446 |
+
"""NesT weight initialization
|
| 447 |
+
Can replicate Jax implementation. Otherwise follows vision_transformer.py
|
| 448 |
+
"""
|
| 449 |
+
if isinstance(module, nn.Linear):
|
| 450 |
+
if name.startswith("head"):
|
| 451 |
+
trunc_normal_(module.weight, std=0.02, a=-2, b=2)
|
| 452 |
+
nn.init.constant_(module.bias, head_bias)
|
| 453 |
+
else:
|
| 454 |
+
trunc_normal_(module.weight, std=0.02, a=-2, b=2)
|
| 455 |
+
if module.bias is not None:
|
| 456 |
+
nn.init.zeros_(module.bias)
|
| 457 |
+
elif isinstance(module, nn.Conv2d):
|
| 458 |
+
trunc_normal_(module.weight, std=0.02, a=-2, b=2)
|
| 459 |
+
if module.bias is not None:
|
| 460 |
+
nn.init.zeros_(module.bias)
|
| 461 |
+
elif isinstance(module, (nn.LayerNorm, nn.GroupNorm, nn.BatchNorm2d)):
|
| 462 |
+
nn.init.zeros_(module.bias)
|
| 463 |
+
nn.init.ones_(module.weight)
|
| 464 |
+
|
| 465 |
+
|
| 466 |
+
def resize_pos_embed(posemb, posemb_new):
|
| 467 |
+
"""
|
| 468 |
+
Rescale the grid of position embeddings when loading from state_dict
|
| 469 |
+
Expected shape of position embeddings is (1, T, N, C), and considers only square images
|
| 470 |
+
"""
|
| 471 |
+
_logger.info("Resized position embedding: %s to %s", posemb.shape, posemb_new.shape)
|
| 472 |
+
seq_length_old = posemb.shape[2]
|
| 473 |
+
num_blocks_new, seq_length_new = posemb_new.shape[1:3]
|
| 474 |
+
size_new = int(math.sqrt(num_blocks_new * seq_length_new))
|
| 475 |
+
# First change to (1, C, H, W)
|
| 476 |
+
posemb = deblockify(posemb, int(math.sqrt(seq_length_old))).permute(0, 3, 1, 2)
|
| 477 |
+
posemb = F.interpolate(posemb, size=[size_new, size_new], mode="bicubic", align_corners=False)
|
| 478 |
+
# Now change to new (1, T, N, C)
|
| 479 |
+
posemb = blockify(posemb.permute(0, 2, 3, 1), int(math.sqrt(seq_length_new)))
|
| 480 |
+
return posemb
|
| 481 |
+
|
| 482 |
+
|
| 483 |
+
def checkpoint_filter_fn(state_dict, model):
|
| 484 |
+
"""resize positional embeddings of pretrained weights"""
|
| 485 |
+
pos_embed_keys = [k for k in state_dict.keys() if k.startswith("pos_embed_")]
|
| 486 |
+
for k in pos_embed_keys:
|
| 487 |
+
if state_dict[k].shape != getattr(model, k).shape:
|
| 488 |
+
state_dict[k] = resize_pos_embed(state_dict[k], getattr(model, k))
|
| 489 |
+
return state_dict
|
scripts/networks/patchEmbed3D.py
ADDED
|
@@ -0,0 +1,190 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
#!/usr/bin/env python3
|
| 2 |
+
|
| 3 |
+
# Copyright 2020 - 2021 MONAI Consortium
|
| 4 |
+
# Licensed under the Apache License, Version 2.0 (the "License");
|
| 5 |
+
# you may not use this file except in compliance with the License.
|
| 6 |
+
# You may obtain a copy of the License at
|
| 7 |
+
# http://www.apache.org/licenses/LICENSE-2.0
|
| 8 |
+
# Unless required by applicable law or agreed to in writing, software
|
| 9 |
+
# distributed under the License is distributed on an "AS IS" BASIS,
|
| 10 |
+
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
|
| 11 |
+
# See the License for the specific language governing permissions and
|
| 12 |
+
# limitations under the License.
|
| 13 |
+
|
| 14 |
+
|
| 15 |
+
import math
|
| 16 |
+
from typing import Sequence, Tuple, Union
|
| 17 |
+
|
| 18 |
+
import torch
|
| 19 |
+
import torch.nn as nn
|
| 20 |
+
import torch.nn.functional as F
|
| 21 |
+
from monai.utils import optional_import
|
| 22 |
+
|
| 23 |
+
Rearrange, _ = optional_import("einops.layers.torch", name="Rearrange")
|
| 24 |
+
|
| 25 |
+
|
| 26 |
+
class PatchEmbeddingBlock(nn.Module):
|
| 27 |
+
"""
|
| 28 |
+
A patch embedding block, based on: "Dosovitskiy et al.,
|
| 29 |
+
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale <https://arxiv.org/abs/2010.11929>"
|
| 30 |
+
"""
|
| 31 |
+
|
| 32 |
+
def __init__(
|
| 33 |
+
self,
|
| 34 |
+
in_channels: int,
|
| 35 |
+
img_size: Tuple[int, int, int],
|
| 36 |
+
patch_size: Tuple[int, int, int],
|
| 37 |
+
hidden_size: int,
|
| 38 |
+
num_heads: int,
|
| 39 |
+
pos_embed: str,
|
| 40 |
+
dropout_rate: float = 0.0,
|
| 41 |
+
) -> None:
|
| 42 |
+
"""
|
| 43 |
+
Args:
|
| 44 |
+
in_channels: dimension of input channels.
|
| 45 |
+
img_size: dimension of input image.
|
| 46 |
+
patch_size: dimension of patch size.
|
| 47 |
+
hidden_size: dimension of hidden layer.
|
| 48 |
+
num_heads: number of attention heads.
|
| 49 |
+
pos_embed: position embedding layer type.
|
| 50 |
+
dropout_rate: faction of the input units to drop.
|
| 51 |
+
|
| 52 |
+
"""
|
| 53 |
+
|
| 54 |
+
super().__init__()
|
| 55 |
+
|
| 56 |
+
if not (0 <= dropout_rate <= 1):
|
| 57 |
+
raise AssertionError("dropout_rate should be between 0 and 1.")
|
| 58 |
+
|
| 59 |
+
if hidden_size % num_heads != 0:
|
| 60 |
+
raise AssertionError("hidden size should be divisible by num_heads.")
|
| 61 |
+
|
| 62 |
+
for m, p in zip(img_size, patch_size):
|
| 63 |
+
if m < p:
|
| 64 |
+
raise AssertionError("patch_size should be smaller than img_size.")
|
| 65 |
+
|
| 66 |
+
if pos_embed not in ["conv", "perceptron"]:
|
| 67 |
+
raise KeyError(f"Position embedding layer of type {pos_embed} is not supported.")
|
| 68 |
+
|
| 69 |
+
if pos_embed == "perceptron":
|
| 70 |
+
if img_size[0] % patch_size[0] != 0:
|
| 71 |
+
raise AssertionError("img_size should be divisible by patch_size for perceptron patch embedding.")
|
| 72 |
+
|
| 73 |
+
self.n_patches = (
|
| 74 |
+
(img_size[0] // patch_size[0]) * (img_size[1] // patch_size[1]) * (img_size[2] // patch_size[2])
|
| 75 |
+
)
|
| 76 |
+
self.patch_dim = in_channels * patch_size[0] * patch_size[1] * patch_size[2]
|
| 77 |
+
|
| 78 |
+
self.pos_embed = pos_embed
|
| 79 |
+
self.patch_embeddings: Union[nn.Conv3d, nn.Sequential]
|
| 80 |
+
if self.pos_embed == "conv":
|
| 81 |
+
self.patch_embeddings = nn.Conv3d(
|
| 82 |
+
in_channels=in_channels, out_channels=hidden_size, kernel_size=patch_size, stride=patch_size
|
| 83 |
+
)
|
| 84 |
+
elif self.pos_embed == "perceptron":
|
| 85 |
+
self.patch_embeddings = nn.Sequential(
|
| 86 |
+
Rearrange(
|
| 87 |
+
"b c (h p1) (w p2) (d p3)-> b (h w d) (p1 p2 p3 c)",
|
| 88 |
+
p1=patch_size[0],
|
| 89 |
+
p2=patch_size[1],
|
| 90 |
+
p3=patch_size[2],
|
| 91 |
+
),
|
| 92 |
+
nn.Linear(self.patch_dim, hidden_size),
|
| 93 |
+
)
|
| 94 |
+
self.position_embeddings = nn.Parameter(torch.zeros(1, self.n_patches, hidden_size))
|
| 95 |
+
self.cls_token = nn.Parameter(torch.zeros(1, 1, hidden_size))
|
| 96 |
+
self.dropout = nn.Dropout(dropout_rate)
|
| 97 |
+
self.trunc_normal_(self.position_embeddings, mean=0.0, std=0.02, a=-2.0, b=2.0)
|
| 98 |
+
self.apply(self._init_weights)
|
| 99 |
+
|
| 100 |
+
def _init_weights(self, m):
|
| 101 |
+
if isinstance(m, nn.Linear):
|
| 102 |
+
self.trunc_normal_(m.weight, mean=0.0, std=0.02, a=-2.0, b=2.0)
|
| 103 |
+
if isinstance(m, nn.Linear) and m.bias is not None:
|
| 104 |
+
nn.init.constant_(m.bias, 0)
|
| 105 |
+
elif isinstance(m, nn.LayerNorm):
|
| 106 |
+
nn.init.constant_(m.bias, 0)
|
| 107 |
+
nn.init.constant_(m.weight, 1.0)
|
| 108 |
+
|
| 109 |
+
def trunc_normal_(self, tensor, mean, std, a, b):
|
| 110 |
+
# From PyTorch official master until it's in a few official releases - RW
|
| 111 |
+
# Method based on https://people.sc.fsu.edu/~jburkardt/presentations/truncated_normal.pdf
|
| 112 |
+
def norm_cdf(x):
|
| 113 |
+
return (1.0 + math.erf(x / math.sqrt(2.0))) / 2.0
|
| 114 |
+
|
| 115 |
+
with torch.no_grad():
|
| 116 |
+
l = norm_cdf((a - mean) / std)
|
| 117 |
+
u = norm_cdf((b - mean) / std)
|
| 118 |
+
tensor.uniform_(2 * l - 1, 2 * u - 1)
|
| 119 |
+
tensor.erfinv_()
|
| 120 |
+
tensor.mul_(std * math.sqrt(2.0))
|
| 121 |
+
tensor.add_(mean)
|
| 122 |
+
tensor.clamp_(min=a, max=b)
|
| 123 |
+
return tensor
|
| 124 |
+
|
| 125 |
+
def forward(self, x):
|
| 126 |
+
if self.pos_embed == "conv":
|
| 127 |
+
x = self.patch_embeddings(x)
|
| 128 |
+
x = x.flatten(2)
|
| 129 |
+
x = x.transpose(-1, -2)
|
| 130 |
+
elif self.pos_embed == "perceptron":
|
| 131 |
+
x = self.patch_embeddings(x)
|
| 132 |
+
embeddings = x + self.position_embeddings
|
| 133 |
+
embeddings = self.dropout(embeddings)
|
| 134 |
+
return embeddings
|
| 135 |
+
|
| 136 |
+
|
| 137 |
+
class PatchEmbed3D(nn.Module):
|
| 138 |
+
"""Video to Patch Embedding.
|
| 139 |
+
|
| 140 |
+
Args:
|
| 141 |
+
patch_size (int): Patch token size. Default: (2,4,4).
|
| 142 |
+
in_chans (int): Number of input video channels. Default: 3.
|
| 143 |
+
embed_dim (int): Number of linear projection output channels. Default: 96.
|
| 144 |
+
norm_layer (nn.Module, optional): Normalization layer. Default: None
|
| 145 |
+
"""
|
| 146 |
+
|
| 147 |
+
def __init__(
|
| 148 |
+
self,
|
| 149 |
+
img_size: Sequence[int] = (96, 96, 96),
|
| 150 |
+
patch_size=(4, 4, 4),
|
| 151 |
+
in_chans: int = 1,
|
| 152 |
+
embed_dim: int = 96,
|
| 153 |
+
norm_layer=None,
|
| 154 |
+
):
|
| 155 |
+
super().__init__()
|
| 156 |
+
self.patch_size = patch_size
|
| 157 |
+
|
| 158 |
+
self.in_chans = in_chans
|
| 159 |
+
self.embed_dim = embed_dim
|
| 160 |
+
|
| 161 |
+
self.grid_size = (img_size[0] // patch_size[0], img_size[1] // patch_size[1], img_size[2] // patch_size[2])
|
| 162 |
+
self.num_patches = self.grid_size[0] * self.grid_size[1] * self.grid_size[2]
|
| 163 |
+
|
| 164 |
+
self.proj = nn.Conv3d(in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)
|
| 165 |
+
|
| 166 |
+
if norm_layer is not None:
|
| 167 |
+
self.norm = norm_layer(embed_dim)
|
| 168 |
+
else:
|
| 169 |
+
self.norm = None
|
| 170 |
+
|
| 171 |
+
def forward(self, x):
|
| 172 |
+
"""Forward function."""
|
| 173 |
+
# padding
|
| 174 |
+
_, _, d, h, w = x.size()
|
| 175 |
+
if w % self.patch_size[2] != 0:
|
| 176 |
+
x = F.pad(x, (0, self.patch_size[2] - w % self.patch_size[2]))
|
| 177 |
+
if h % self.patch_size[1] != 0:
|
| 178 |
+
x = F.pad(x, (0, 0, 0, self.patch_size[1] - h % self.patch_size[1]))
|
| 179 |
+
if d % self.patch_size[0] != 0:
|
| 180 |
+
x = F.pad(x, (0, 0, 0, 0, 0, self.patch_size[0] - d % self.patch_size[0]))
|
| 181 |
+
|
| 182 |
+
x = self.proj(x) # B C D Wh Ww
|
| 183 |
+
if self.norm is not None:
|
| 184 |
+
d, wh, ww = x.size(2), x.size(3), x.size(4)
|
| 185 |
+
x = x.flatten(2).transpose(1, 2)
|
| 186 |
+
x = self.norm(x)
|
| 187 |
+
x = x.transpose(1, 2).view(-1, self.embed_dim, d, wh, ww)
|
| 188 |
+
# pdb.set_trace()
|
| 189 |
+
|
| 190 |
+
return x
|
scripts/networks/unest.py
ADDED
|
@@ -0,0 +1,274 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
#!/usr/bin/env python3
|
| 2 |
+
|
| 3 |
+
"""
|
| 4 |
+
The 3D NEST transformer based segmentation model
|
| 5 |
+
|
| 6 |
+
MASI Lab, Vanderbilty University
|
| 7 |
+
|
| 8 |
+
|
| 9 |
+
Authors: Xin Yu, Yinchi Zhou, Yucheng Tang, Bennett Landman
|
| 10 |
+
|
| 11 |
+
|
| 12 |
+
The NEST code is partly from
|
| 13 |
+
|
| 14 |
+
Nested Hierarchical Transformer: Towards Accurate, Data-Efficient and
|
| 15 |
+
Interpretable Visual Understanding
|
| 16 |
+
https://arxiv.org/pdf/2105.12723.pdf
|
| 17 |
+
|
| 18 |
+
|
| 19 |
+
"""
|
| 20 |
+
|
| 21 |
+
|
| 22 |
+
# limitations under the License.
|
| 23 |
+
from typing import Sequence, Tuple, Union
|
| 24 |
+
|
| 25 |
+
import torch
|
| 26 |
+
import torch.nn as nn
|
| 27 |
+
from monai.networks.blocks import Convolution
|
| 28 |
+
from monai.networks.blocks.dynunet_block import UnetOutBlock
|
| 29 |
+
|
| 30 |
+
# from scripts.networks.swin_transformer_3d import SwinTransformer3D
|
| 31 |
+
from scripts.networks.nest_transformer_3D import NestTransformer3D
|
| 32 |
+
from scripts.networks.unest_block import UNesTBlock, UNesTConvBlock, UNestUpBlock
|
| 33 |
+
|
| 34 |
+
# from monai.networks.blocks.unetr_block import UnetstrBasicBlock, UnetrPrUpBlock, UnetResBlock
|
| 35 |
+
|
| 36 |
+
|
| 37 |
+
class UNesT(nn.Module):
|
| 38 |
+
"""
|
| 39 |
+
UNesT model implementation
|
| 40 |
+
"""
|
| 41 |
+
|
| 42 |
+
def __init__(
|
| 43 |
+
self,
|
| 44 |
+
in_channels: int,
|
| 45 |
+
out_channels: int,
|
| 46 |
+
img_size: Sequence[int] = (96, 96, 96),
|
| 47 |
+
feature_size: int = 16,
|
| 48 |
+
patch_size: int = 2,
|
| 49 |
+
depths: Sequence[int] = (2, 2, 2, 2),
|
| 50 |
+
num_heads: Sequence[int] = (3, 6, 12, 24),
|
| 51 |
+
window_size: Sequence[int] = (7, 7, 7),
|
| 52 |
+
norm_name: Union[Tuple, str] = "instance",
|
| 53 |
+
conv_block: bool = False,
|
| 54 |
+
res_block: bool = True,
|
| 55 |
+
# featResBlock: bool = False,
|
| 56 |
+
dropout_rate: float = 0.0,
|
| 57 |
+
) -> None:
|
| 58 |
+
"""
|
| 59 |
+
Args:
|
| 60 |
+
in_channels: dimension of input channels.
|
| 61 |
+
out_channels: dimension of output channels.
|
| 62 |
+
img_size: dimension of input image.
|
| 63 |
+
feature_size: dimension of network feature size.
|
| 64 |
+
hidden_size: dimension of hidden layer.
|
| 65 |
+
mlp_dim: dimension of feedforward layer.
|
| 66 |
+
num_heads: number of attention heads.
|
| 67 |
+
pos_embed: position embedding layer type.
|
| 68 |
+
norm_name: feature normalization type and arguments.
|
| 69 |
+
conv_block: bool argument to determine if convolutional block is used.
|
| 70 |
+
res_block: bool argument to determine if residual block is used.
|
| 71 |
+
dropout_rate: faction of the input units to drop.
|
| 72 |
+
|
| 73 |
+
"""
|
| 74 |
+
|
| 75 |
+
super().__init__()
|
| 76 |
+
|
| 77 |
+
if not (0 <= dropout_rate <= 1):
|
| 78 |
+
raise AssertionError("dropout_rate should be between 0 and 1.")
|
| 79 |
+
|
| 80 |
+
self.embed_dim = [128, 256, 512]
|
| 81 |
+
|
| 82 |
+
self.nestViT = NestTransformer3D(
|
| 83 |
+
img_size=96,
|
| 84 |
+
in_chans=1,
|
| 85 |
+
patch_size=4,
|
| 86 |
+
num_levels=3,
|
| 87 |
+
embed_dims=(128, 256, 512),
|
| 88 |
+
num_heads=(4, 8, 16),
|
| 89 |
+
depths=(2, 2, 8),
|
| 90 |
+
num_classes=1000,
|
| 91 |
+
mlp_ratio=4.0,
|
| 92 |
+
qkv_bias=True,
|
| 93 |
+
drop_rate=0.0,
|
| 94 |
+
attn_drop_rate=0.0,
|
| 95 |
+
drop_path_rate=0.5,
|
| 96 |
+
norm_layer=None,
|
| 97 |
+
act_layer=None,
|
| 98 |
+
pad_type="",
|
| 99 |
+
weight_init="",
|
| 100 |
+
global_pool="avg",
|
| 101 |
+
)
|
| 102 |
+
|
| 103 |
+
self.encoder1 = UNesTConvBlock(
|
| 104 |
+
spatial_dims=3,
|
| 105 |
+
in_channels=1,
|
| 106 |
+
out_channels=feature_size * 2,
|
| 107 |
+
kernel_size=3,
|
| 108 |
+
stride=1,
|
| 109 |
+
norm_name=norm_name,
|
| 110 |
+
res_block=res_block,
|
| 111 |
+
)
|
| 112 |
+
self.encoder2 = UNestUpBlock(
|
| 113 |
+
spatial_dims=3,
|
| 114 |
+
in_channels=self.embed_dim[0],
|
| 115 |
+
out_channels=feature_size * 4,
|
| 116 |
+
num_layer=1,
|
| 117 |
+
kernel_size=3,
|
| 118 |
+
stride=1,
|
| 119 |
+
upsample_kernel_size=2,
|
| 120 |
+
norm_name=norm_name,
|
| 121 |
+
conv_block=False,
|
| 122 |
+
res_block=False,
|
| 123 |
+
)
|
| 124 |
+
|
| 125 |
+
self.encoder3 = UNesTConvBlock(
|
| 126 |
+
spatial_dims=3,
|
| 127 |
+
in_channels=self.embed_dim[0],
|
| 128 |
+
out_channels=8 * feature_size,
|
| 129 |
+
kernel_size=3,
|
| 130 |
+
stride=1,
|
| 131 |
+
norm_name=norm_name,
|
| 132 |
+
res_block=res_block,
|
| 133 |
+
)
|
| 134 |
+
|
| 135 |
+
self.encoder4 = UNesTConvBlock(
|
| 136 |
+
spatial_dims=3,
|
| 137 |
+
in_channels=self.embed_dim[1],
|
| 138 |
+
out_channels=16 * feature_size,
|
| 139 |
+
kernel_size=3,
|
| 140 |
+
stride=1,
|
| 141 |
+
norm_name=norm_name,
|
| 142 |
+
res_block=res_block,
|
| 143 |
+
)
|
| 144 |
+
self.decoder5 = UNesTBlock(
|
| 145 |
+
spatial_dims=3,
|
| 146 |
+
in_channels=2 * self.embed_dim[2],
|
| 147 |
+
out_channels=feature_size * 32,
|
| 148 |
+
stride=1,
|
| 149 |
+
kernel_size=3,
|
| 150 |
+
upsample_kernel_size=2,
|
| 151 |
+
norm_name=norm_name,
|
| 152 |
+
res_block=res_block,
|
| 153 |
+
)
|
| 154 |
+
self.decoder4 = UNesTBlock(
|
| 155 |
+
spatial_dims=3,
|
| 156 |
+
in_channels=self.embed_dim[2],
|
| 157 |
+
out_channels=feature_size * 16,
|
| 158 |
+
stride=1,
|
| 159 |
+
kernel_size=3,
|
| 160 |
+
upsample_kernel_size=2,
|
| 161 |
+
norm_name=norm_name,
|
| 162 |
+
res_block=res_block,
|
| 163 |
+
)
|
| 164 |
+
self.decoder3 = UNesTBlock(
|
| 165 |
+
spatial_dims=3,
|
| 166 |
+
in_channels=feature_size * 16,
|
| 167 |
+
out_channels=feature_size * 8,
|
| 168 |
+
stride=1,
|
| 169 |
+
kernel_size=3,
|
| 170 |
+
upsample_kernel_size=2,
|
| 171 |
+
norm_name=norm_name,
|
| 172 |
+
res_block=res_block,
|
| 173 |
+
)
|
| 174 |
+
self.decoder2 = UNesTBlock(
|
| 175 |
+
spatial_dims=3,
|
| 176 |
+
in_channels=feature_size * 8,
|
| 177 |
+
out_channels=feature_size * 4,
|
| 178 |
+
stride=1,
|
| 179 |
+
kernel_size=3,
|
| 180 |
+
upsample_kernel_size=2,
|
| 181 |
+
norm_name=norm_name,
|
| 182 |
+
res_block=res_block,
|
| 183 |
+
)
|
| 184 |
+
|
| 185 |
+
self.decoder1 = UNesTBlock(
|
| 186 |
+
spatial_dims=3,
|
| 187 |
+
in_channels=feature_size * 4,
|
| 188 |
+
out_channels=feature_size * 2,
|
| 189 |
+
stride=1,
|
| 190 |
+
kernel_size=3,
|
| 191 |
+
upsample_kernel_size=2,
|
| 192 |
+
norm_name=norm_name,
|
| 193 |
+
res_block=res_block,
|
| 194 |
+
)
|
| 195 |
+
|
| 196 |
+
self.encoder10 = Convolution(
|
| 197 |
+
dimensions=3,
|
| 198 |
+
in_channels=32 * feature_size,
|
| 199 |
+
out_channels=64 * feature_size,
|
| 200 |
+
strides=2,
|
| 201 |
+
adn_ordering="ADN",
|
| 202 |
+
dropout=0.0,
|
| 203 |
+
)
|
| 204 |
+
|
| 205 |
+
self.out = UnetOutBlock(spatial_dims=3, in_channels=feature_size * 2, out_channels=out_channels) # type: ignore
|
| 206 |
+
|
| 207 |
+
def proj_feat(self, x, hidden_size, feat_size):
|
| 208 |
+
x = x.view(x.size(0), feat_size[0], feat_size[1], feat_size[2], hidden_size)
|
| 209 |
+
x = x.permute(0, 4, 1, 2, 3).contiguous()
|
| 210 |
+
return x
|
| 211 |
+
|
| 212 |
+
def load_from(self, weights):
|
| 213 |
+
with torch.no_grad():
|
| 214 |
+
# copy weights from patch embedding
|
| 215 |
+
for i in weights["state_dict"]:
|
| 216 |
+
print(i)
|
| 217 |
+
self.vit.patch_embedding.position_embeddings.copy_(
|
| 218 |
+
weights["state_dict"]["module.transformer.patch_embedding.position_embeddings_3d"]
|
| 219 |
+
)
|
| 220 |
+
self.vit.patch_embedding.cls_token.copy_(
|
| 221 |
+
weights["state_dict"]["module.transformer.patch_embedding.cls_token"]
|
| 222 |
+
)
|
| 223 |
+
self.vit.patch_embedding.patch_embeddings[1].weight.copy_(
|
| 224 |
+
weights["state_dict"]["module.transformer.patch_embedding.patch_embeddings_3d.1.weight"]
|
| 225 |
+
)
|
| 226 |
+
self.vit.patch_embedding.patch_embeddings[1].bias.copy_(
|
| 227 |
+
weights["state_dict"]["module.transformer.patch_embedding.patch_embeddings_3d.1.bias"]
|
| 228 |
+
)
|
| 229 |
+
|
| 230 |
+
# copy weights from encoding blocks (default: num of blocks: 12)
|
| 231 |
+
for bname, block in self.vit.blocks.named_children():
|
| 232 |
+
print(block)
|
| 233 |
+
block.loadFrom(weights, n_block=bname)
|
| 234 |
+
# last norm layer of transformer
|
| 235 |
+
self.vit.norm.weight.copy_(weights["state_dict"]["module.transformer.norm.weight"])
|
| 236 |
+
self.vit.norm.bias.copy_(weights["state_dict"]["module.transformer.norm.bias"])
|
| 237 |
+
|
| 238 |
+
def forward(self, x_in):
|
| 239 |
+
x, hidden_states_out = self.nestViT(x_in)
|
| 240 |
+
|
| 241 |
+
enc0 = self.encoder1(x_in) # 2, 32, 96, 96, 96
|
| 242 |
+
|
| 243 |
+
x1 = hidden_states_out[0] # 2, 128, 24, 24, 24
|
| 244 |
+
|
| 245 |
+
enc1 = self.encoder2(x1) # 2, 64, 48, 48, 48
|
| 246 |
+
|
| 247 |
+
x2 = hidden_states_out[1] # 2, 128, 24, 24, 24
|
| 248 |
+
|
| 249 |
+
enc2 = self.encoder3(x2) # 2, 128, 24, 24, 24
|
| 250 |
+
|
| 251 |
+
x3 = hidden_states_out[2] # 2, 256, 12, 12, 12
|
| 252 |
+
|
| 253 |
+
enc3 = self.encoder4(x3) # 2, 256, 12, 12, 12
|
| 254 |
+
|
| 255 |
+
x4 = hidden_states_out[3]
|
| 256 |
+
|
| 257 |
+
enc4 = x4 # 2, 512, 6, 6, 6
|
| 258 |
+
|
| 259 |
+
dec4 = x # 2, 512, 6, 6, 6
|
| 260 |
+
|
| 261 |
+
dec4 = self.encoder10(dec4) # 2, 1024, 3, 3, 3
|
| 262 |
+
|
| 263 |
+
dec3 = self.decoder5(dec4, enc4) # 2, 512, 6, 6, 6
|
| 264 |
+
|
| 265 |
+
dec2 = self.decoder4(dec3, enc3) # 2, 256, 12, 12, 12
|
| 266 |
+
|
| 267 |
+
dec1 = self.decoder3(dec2, enc2) # 2, 128, 24, 24, 24
|
| 268 |
+
|
| 269 |
+
dec0 = self.decoder2(dec1, enc1) # 2, 64, 48, 48, 48
|
| 270 |
+
|
| 271 |
+
out = self.decoder1(dec0, enc0) # 2, 32, 96, 96, 96
|
| 272 |
+
|
| 273 |
+
logits = self.out(out)
|
| 274 |
+
return logits
|
scripts/networks/unest_block.py
ADDED
|
@@ -0,0 +1,245 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
#!/usr/bin/env python3
|
| 2 |
+
|
| 3 |
+
from typing import Sequence, Tuple, Union
|
| 4 |
+
|
| 5 |
+
import torch
|
| 6 |
+
import torch.nn as nn
|
| 7 |
+
from monai.networks.blocks.dynunet_block import UnetBasicBlock, UnetResBlock, get_conv_layer
|
| 8 |
+
|
| 9 |
+
|
| 10 |
+
class UNesTBlock(nn.Module):
|
| 11 |
+
""" """
|
| 12 |
+
|
| 13 |
+
def __init__(
|
| 14 |
+
self,
|
| 15 |
+
spatial_dims: int,
|
| 16 |
+
in_channels: int,
|
| 17 |
+
out_channels: int, # type: ignore
|
| 18 |
+
kernel_size: Union[Sequence[int], int],
|
| 19 |
+
stride: Union[Sequence[int], int],
|
| 20 |
+
upsample_kernel_size: Union[Sequence[int], int],
|
| 21 |
+
norm_name: Union[Tuple, str],
|
| 22 |
+
res_block: bool = False,
|
| 23 |
+
) -> None:
|
| 24 |
+
"""
|
| 25 |
+
Args:
|
| 26 |
+
spatial_dims: number of spatial dimensions.
|
| 27 |
+
in_channels: number of input channels.
|
| 28 |
+
out_channels: number of output channels.
|
| 29 |
+
kernel_size: convolution kernel size.
|
| 30 |
+
stride: convolution stride.
|
| 31 |
+
upsample_kernel_size: convolution kernel size for transposed convolution layers.
|
| 32 |
+
norm_name: feature normalization type and arguments.
|
| 33 |
+
res_block: bool argument to determine if residual block is used.
|
| 34 |
+
|
| 35 |
+
"""
|
| 36 |
+
|
| 37 |
+
super(UNesTBlock, self).__init__()
|
| 38 |
+
upsample_stride = upsample_kernel_size
|
| 39 |
+
self.transp_conv = get_conv_layer(
|
| 40 |
+
spatial_dims,
|
| 41 |
+
in_channels,
|
| 42 |
+
out_channels,
|
| 43 |
+
kernel_size=upsample_kernel_size,
|
| 44 |
+
stride=upsample_stride,
|
| 45 |
+
conv_only=True,
|
| 46 |
+
is_transposed=True,
|
| 47 |
+
)
|
| 48 |
+
|
| 49 |
+
if res_block:
|
| 50 |
+
self.conv_block = UnetResBlock(
|
| 51 |
+
spatial_dims,
|
| 52 |
+
out_channels + out_channels,
|
| 53 |
+
out_channels,
|
| 54 |
+
kernel_size=kernel_size,
|
| 55 |
+
stride=1,
|
| 56 |
+
norm_name=norm_name,
|
| 57 |
+
)
|
| 58 |
+
else:
|
| 59 |
+
self.conv_block = UnetBasicBlock( # type: ignore
|
| 60 |
+
spatial_dims,
|
| 61 |
+
out_channels + out_channels,
|
| 62 |
+
out_channels,
|
| 63 |
+
kernel_size=kernel_size,
|
| 64 |
+
stride=1,
|
| 65 |
+
norm_name=norm_name,
|
| 66 |
+
)
|
| 67 |
+
|
| 68 |
+
def forward(self, inp, skip):
|
| 69 |
+
# number of channels for skip should equals to out_channels
|
| 70 |
+
out = self.transp_conv(inp)
|
| 71 |
+
# print(out.shape)
|
| 72 |
+
# print(skip.shape)
|
| 73 |
+
out = torch.cat((out, skip), dim=1)
|
| 74 |
+
out = self.conv_block(out)
|
| 75 |
+
return out
|
| 76 |
+
|
| 77 |
+
|
| 78 |
+
class UNestUpBlock(nn.Module):
|
| 79 |
+
""" """
|
| 80 |
+
|
| 81 |
+
def __init__(
|
| 82 |
+
self,
|
| 83 |
+
spatial_dims: int,
|
| 84 |
+
in_channels: int,
|
| 85 |
+
out_channels: int,
|
| 86 |
+
num_layer: int,
|
| 87 |
+
kernel_size: Union[Sequence[int], int],
|
| 88 |
+
stride: Union[Sequence[int], int],
|
| 89 |
+
upsample_kernel_size: Union[Sequence[int], int],
|
| 90 |
+
norm_name: Union[Tuple, str],
|
| 91 |
+
conv_block: bool = False,
|
| 92 |
+
res_block: bool = False,
|
| 93 |
+
) -> None:
|
| 94 |
+
"""
|
| 95 |
+
Args:
|
| 96 |
+
spatial_dims: number of spatial dimensions.
|
| 97 |
+
in_channels: number of input channels.
|
| 98 |
+
out_channels: number of output channels.
|
| 99 |
+
num_layer: number of upsampling blocks.
|
| 100 |
+
kernel_size: convolution kernel size.
|
| 101 |
+
stride: convolution stride.
|
| 102 |
+
upsample_kernel_size: convolution kernel size for transposed convolution layers.
|
| 103 |
+
norm_name: feature normalization type and arguments.
|
| 104 |
+
conv_block: bool argument to determine if convolutional block is used.
|
| 105 |
+
res_block: bool argument to determine if residual block is used.
|
| 106 |
+
|
| 107 |
+
"""
|
| 108 |
+
|
| 109 |
+
super().__init__()
|
| 110 |
+
|
| 111 |
+
upsample_stride = upsample_kernel_size
|
| 112 |
+
self.transp_conv_init = get_conv_layer(
|
| 113 |
+
spatial_dims,
|
| 114 |
+
in_channels,
|
| 115 |
+
out_channels,
|
| 116 |
+
kernel_size=upsample_kernel_size,
|
| 117 |
+
stride=upsample_stride,
|
| 118 |
+
conv_only=True,
|
| 119 |
+
is_transposed=True,
|
| 120 |
+
)
|
| 121 |
+
if conv_block:
|
| 122 |
+
if res_block:
|
| 123 |
+
self.blocks = nn.ModuleList(
|
| 124 |
+
[
|
| 125 |
+
nn.Sequential(
|
| 126 |
+
get_conv_layer(
|
| 127 |
+
spatial_dims,
|
| 128 |
+
out_channels,
|
| 129 |
+
out_channels,
|
| 130 |
+
kernel_size=upsample_kernel_size,
|
| 131 |
+
stride=upsample_stride,
|
| 132 |
+
conv_only=True,
|
| 133 |
+
is_transposed=True,
|
| 134 |
+
),
|
| 135 |
+
UnetResBlock(
|
| 136 |
+
spatial_dims=3,
|
| 137 |
+
in_channels=out_channels,
|
| 138 |
+
out_channels=out_channels,
|
| 139 |
+
kernel_size=kernel_size,
|
| 140 |
+
stride=stride,
|
| 141 |
+
norm_name=norm_name,
|
| 142 |
+
),
|
| 143 |
+
)
|
| 144 |
+
for i in range(num_layer)
|
| 145 |
+
]
|
| 146 |
+
)
|
| 147 |
+
else:
|
| 148 |
+
self.blocks = nn.ModuleList(
|
| 149 |
+
[
|
| 150 |
+
nn.Sequential(
|
| 151 |
+
get_conv_layer(
|
| 152 |
+
spatial_dims,
|
| 153 |
+
out_channels,
|
| 154 |
+
out_channels,
|
| 155 |
+
kernel_size=upsample_kernel_size,
|
| 156 |
+
stride=upsample_stride,
|
| 157 |
+
conv_only=True,
|
| 158 |
+
is_transposed=True,
|
| 159 |
+
),
|
| 160 |
+
UnetBasicBlock(
|
| 161 |
+
spatial_dims=3,
|
| 162 |
+
in_channels=out_channels,
|
| 163 |
+
out_channels=out_channels,
|
| 164 |
+
kernel_size=kernel_size,
|
| 165 |
+
stride=stride,
|
| 166 |
+
norm_name=norm_name,
|
| 167 |
+
),
|
| 168 |
+
)
|
| 169 |
+
for i in range(num_layer)
|
| 170 |
+
]
|
| 171 |
+
)
|
| 172 |
+
else:
|
| 173 |
+
self.blocks = nn.ModuleList(
|
| 174 |
+
[
|
| 175 |
+
get_conv_layer(
|
| 176 |
+
spatial_dims,
|
| 177 |
+
out_channels,
|
| 178 |
+
out_channels,
|
| 179 |
+
kernel_size=1,
|
| 180 |
+
stride=1,
|
| 181 |
+
conv_only=True,
|
| 182 |
+
is_transposed=True,
|
| 183 |
+
)
|
| 184 |
+
for i in range(num_layer)
|
| 185 |
+
]
|
| 186 |
+
)
|
| 187 |
+
|
| 188 |
+
def forward(self, x):
|
| 189 |
+
x = self.transp_conv_init(x)
|
| 190 |
+
for blk in self.blocks:
|
| 191 |
+
x = blk(x)
|
| 192 |
+
return x
|
| 193 |
+
|
| 194 |
+
|
| 195 |
+
class UNesTConvBlock(nn.Module):
|
| 196 |
+
"""
|
| 197 |
+
UNesT block with skip connections
|
| 198 |
+
"""
|
| 199 |
+
|
| 200 |
+
def __init__(
|
| 201 |
+
self,
|
| 202 |
+
spatial_dims: int,
|
| 203 |
+
in_channels: int,
|
| 204 |
+
out_channels: int,
|
| 205 |
+
kernel_size: Union[Sequence[int], int],
|
| 206 |
+
stride: Union[Sequence[int], int],
|
| 207 |
+
norm_name: Union[Tuple, str],
|
| 208 |
+
res_block: bool = False,
|
| 209 |
+
) -> None:
|
| 210 |
+
"""
|
| 211 |
+
Args:
|
| 212 |
+
spatial_dims: number of spatial dimensions.
|
| 213 |
+
in_channels: number of input channels.
|
| 214 |
+
out_channels: number of output channels.
|
| 215 |
+
kernel_size: convolution kernel size.
|
| 216 |
+
stride: convolution stride.
|
| 217 |
+
norm_name: feature normalization type and arguments.
|
| 218 |
+
res_block: bool argument to determine if residual block is used.
|
| 219 |
+
|
| 220 |
+
"""
|
| 221 |
+
|
| 222 |
+
super().__init__()
|
| 223 |
+
|
| 224 |
+
if res_block:
|
| 225 |
+
self.layer = UnetResBlock(
|
| 226 |
+
spatial_dims=spatial_dims,
|
| 227 |
+
in_channels=in_channels,
|
| 228 |
+
out_channels=out_channels,
|
| 229 |
+
kernel_size=kernel_size,
|
| 230 |
+
stride=stride,
|
| 231 |
+
norm_name=norm_name,
|
| 232 |
+
)
|
| 233 |
+
else:
|
| 234 |
+
self.layer = UnetBasicBlock( # type: ignore
|
| 235 |
+
spatial_dims=spatial_dims,
|
| 236 |
+
in_channels=in_channels,
|
| 237 |
+
out_channels=out_channels,
|
| 238 |
+
kernel_size=kernel_size,
|
| 239 |
+
stride=stride,
|
| 240 |
+
norm_name=norm_name,
|
| 241 |
+
)
|
| 242 |
+
|
| 243 |
+
def forward(self, inp):
|
| 244 |
+
out = self.layer(inp)
|
| 245 |
+
return out
|