Spaces:
Running

Running
File size: 10,134 Bytes
633bfc8 bb8db0f 633bfc8 c0eac48 |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 |
---
title: MoMask
emoji: 🎭
colorFrom: pink
colorTo: purple
sdk: gradio
sdk_version: 3.24.1
app_file: app.py
pinned: false
---
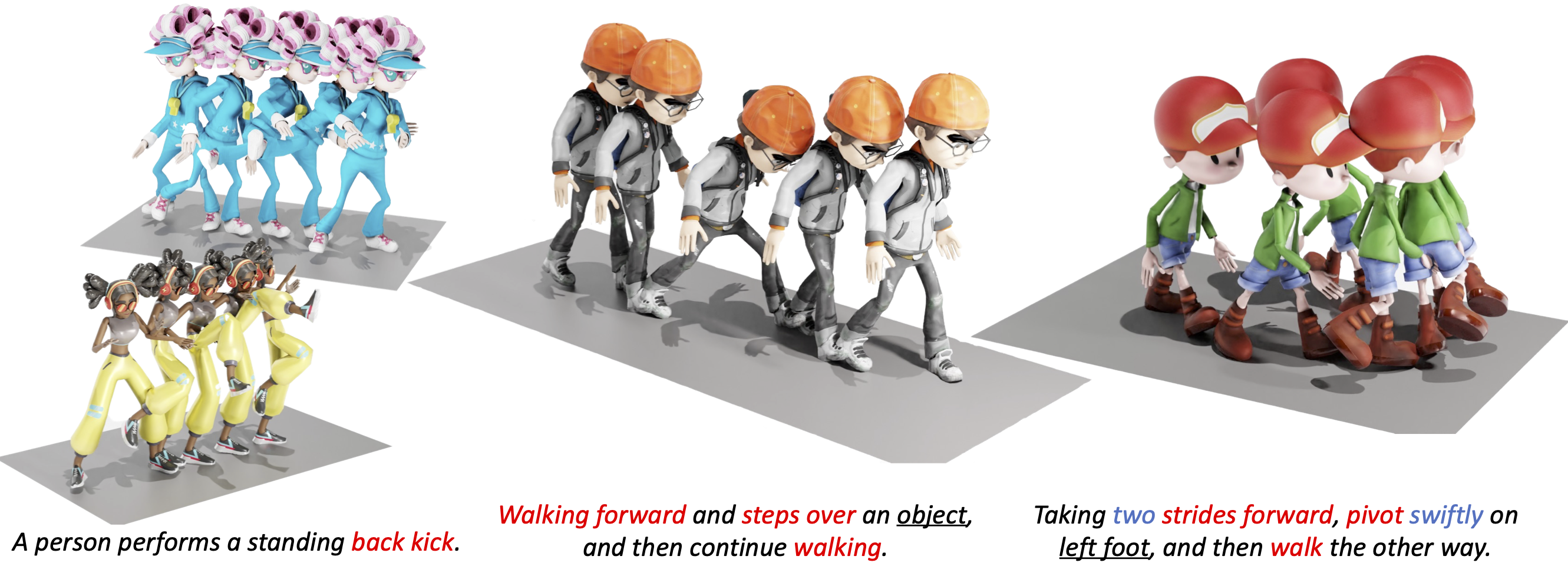
# MoMask: Generative Masked Modeling of 3D Human Motions
## [[Project Page]](https://ericguo5513.github.io/momask) [[Paper]](https://arxiv.org/abs/2312.00063)
If you find our code or paper helpful, please consider citing:
```
@article{guo2023momask,
title={MoMask: Generative Masked Modeling of 3D Human Motions},
author={Chuan Guo and Yuxuan Mu and Muhammad Gohar Javed and Sen Wang and Li Cheng},
year={2023},
eprint={2312.00063},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
```
## :postbox: News
📢 **2023-12-19** --- Release scripts for temporal inpainting.
📢 **2023-12-15** --- Release codes and models for momask. Including training/eval/generation scripts.
📢 **2023-11-29** --- Initialized the webpage and git project.
## :round_pushpin: Get You Ready
<details>
### 1. Conda Environment
```
conda env create -f environment.yml
conda activate momask
pip install git+https://github.com/openai/CLIP.git
```
We test our code on Python 3.7.13 and PyTorch 1.7.1
### 2. Models and Dependencies
#### Download Pre-trained Models
```
bash prepare/download_models.sh
```
#### Download Evaluation Models and Gloves
For evaluation only.
```
bash prepare/download_evaluator.sh
bash prepare/download_glove.sh
```
#### Troubleshooting
To address the download error related to gdown: "Cannot retrieve the public link of the file. You may need to change the permission to 'Anyone with the link', or have had many accesses". A potential solution is to run `pip install --upgrade --no-cache-dir gdown`, as suggested on https://github.com/wkentaro/gdown/issues/43. This should help resolve the issue.
#### (Optional) Download Mannually
Visit [[Google Drive]](https://drive.google.com/drive/folders/1b3GnAbERH8jAoO5mdWgZhyxHB73n23sK?usp=drive_link) to download the models and evaluators mannually.
### 3. Get Data
You have two options here:
* **Skip getting data**, if you just want to generate motions using *own* descriptions.
* **Get full data**, if you want to *re-train* and *evaluate* the model.
**(a). Full data (text + motion)**
**HumanML3D** - Follow the instruction in [HumanML3D](https://github.com/EricGuo5513/HumanML3D.git), then copy the result dataset to our repository:
```
cp -r ../HumanML3D/HumanML3D ./dataset/HumanML3D
```
**KIT**-Download from [HumanML3D](https://github.com/EricGuo5513/HumanML3D.git), then place result in `./dataset/KIT-ML`
####
</details>
## :rocket: Demo
<details>
### (a) Generate from a single prompt
```
python gen_t2m.py --gpu_id 1 --ext exp1 --text_prompt "A person is running on a treadmill."
```
### (b) Generate from a prompt file
An example of prompt file is given in `./assets/text_prompt.txt`. Please follow the format of `<text description>#<motion length>` at each line. Motion length indicates the number of poses, which must be integeter and will be rounded by 4. In our work, motion is in 20 fps.
If you write `<text description>#NA`, our model will determine a length. Note once there is **one** NA, all the others will be **NA** automatically.
```
python gen_t2m.py --gpu_id 1 --ext exp2 --text_path ./assets/text_prompt.txt
```
A few more parameters you may be interested:
* `--repeat_times`: number of replications for generation, default `1`.
* `--motion_length`: specify the number of poses for generation, only applicable in (a).
The output files are stored under folder `./generation/<ext>/`. They are
* `numpy files`: generated motions with shape of (nframe, 22, 3), under subfolder `./joints`.
* `video files`: stick figure animation in mp4 format, under subfolder `./animation`.
* `bvh files`: bvh files of the generated motion, under subfolder `./animation`.
We also apply naive foot ik to the generated motions, see files with suffix `_ik`. It sometimes works well, but sometimes will fail.
</details>
## :dancers: Visualization
<details>
All the animations are manually rendered in blender. We use the characters from [mixamo](https://www.mixamo.com/#/). You need to download the characters in T-Pose with skeleton.
### Retargeting
For retargeting, we found rokoko usually leads to large error on foot. On the other hand, [keemap.rig.transfer](https://github.com/nkeeline/Keemap-Blender-Rig-ReTargeting-Addon/releases) shows more precise retargetting. You could watch the [tutorial](https://www.youtube.com/watch?v=EG-VCMkVpxg) here.
Following these steps:
* Download keemap.rig.transfer from the github, and install it in blender.
* Import both the motion files (.bvh) and character files (.fbx) in blender.
* `Shift + Select` the both source and target skeleton. (Do not need to be Rest Position)
* Switch to `Pose Mode`, then unfold the `KeeMapRig` tool at the top-right corner of the view window.
* Load and read the bone mapping file `./assets/mapping.json`(or `mapping6.json` if it doesn't work). This file is manually made by us. It works for most characters in mixamo. You could make your own.
* Adjust the `Number of Samples`, `Source Rig`, `Destination Rig Name`.
* Clik `Transfer Animation from Source Destination`, wait a few seconds.
We didn't tried other retargetting tools. Welcome to comment if you find others are more useful.
### Scene
We use this [scene](https://drive.google.com/file/d/1lg62nugD7RTAIz0Q_YP2iZsxpUzzOkT1/view?usp=sharing) for animation.
</details>
## :clapper: Temporal Inpainting
<details>
We conduct mask-based editing in the m-transformer stage, followed by the regeneration of residual tokens for the entire sequence. To load your own motion, provide the path through `--source_motion`. Utilize `-msec` to specify the mask section, supporting either ratio or frame index. For instance, `-msec 0.3,0.6` with `max_motion_length=196` is equivalent to `-msec 59,118`, indicating the editing of the frame section [59, 118].
```
python edit_t2m.py --gpu_id 1 --ext exp3 --use_res_model -msec 0.4,0.7 --text_prompt "A man picks something from the ground using his right hand."
```
Note: Presently, the source motion must adhere to the format of a HumanML3D dim-263 feature vector. An example motion vector data from the HumanML3D test set is available in `example_data/000612.npy`. To process your own motion data, you can utilize the `process_file` function from `utils/motion_process.py`.
</details>
## :space_invader: Train Your Own Models
<details>
**Note**: You have to train RVQ **BEFORE** training masked/residual transformers. The latter two can be trained simultaneously.
### Train RVQ
```
python train_vq.py --name rvq_name --gpu_id 1 --dataset_name t2m --batch_size 512 --num_quantizers 6 --max_epoch 500 --quantize_drop_prob 0.2
```
### Train Masked Transformer
```
python train_t2m_transformer.py --name mtrans_name --gpu_id 2 --dataset_name t2m --batch_size 64 --vq_name rvq_name
```
### Train Residual Transformer
```
python train_res_transformer.py --name rtrans_name --gpu_id 2 --dataset_name t2m --batch_size 64 --vq_name rvq_name --cond_drop_prob 0.2 --share_weight
```
* `--dataset_name`: motion dataset, `t2m` for HumanML3D and `kit` for KIT-ML.
* `--name`: name your model. This will create to model space as `./checkpoints/<dataset_name>/<name>`
* `--gpu_id`: GPU id.
* `--batch_size`: we use `512` for rvq training. For masked/residual transformer, we use `64` on HumanML3D and `16` for KIT-ML.
* `--num_quantizers`: number of quantization layers, `6` is used in our case.
* `--quantize_drop_prob`: quantization dropout ratio, `0.2` is used.
* `--vq_name`: when training masked/residual transformer, you need to specify the name of rvq model for tokenization.
* `--cond_drop_prob`: condition drop ratio, for classifier-free guidance. `0.2` is used.
* `--share_weight`: whether to share the projection/embedding weights in residual transformer.
All the pre-trained models and intermediate results will be saved in space `./checkpoints/<dataset_name>/<name>`.
</details>
## :book: Evaluation
<details>
### Evaluate RVQ Reconstruction:
HumanML3D:
```
python eval_t2m_vq.py --gpu_id 0 --name rvq_nq6_dc512_nc512_noshare_qdp0.2 --dataset_name t2m --ext rvq_nq6
```
KIT-ML:
```
python eval_t2m_vq.py --gpu_id 0 --name rvq_nq6_dc512_nc512_noshare_qdp0.2_k --dataset_name kit --ext rvq_nq6
```
### Evaluate Text2motion Generation:
HumanML3D:
```
python eval_t2m_trans_res.py --res_name tres_nlayer8_ld384_ff1024_rvq6ns_cdp0.2_sw --dataset_name t2m --name t2m_nlayer8_nhead6_ld384_ff1024_cdp0.1_rvq6ns --gpu_id 1 --cond_scale 4 --time_steps 10 --ext evaluation
```
KIT-ML:
```
python eval_t2m_trans_res.py --res_name tres_nlayer8_ld384_ff1024_rvq6ns_cdp0.2_sw_k --dataset_name kit --name t2m_nlayer8_nhead6_ld384_ff1024_cdp0.1_rvq6ns_k --gpu_id 0 --cond_scale 2 --time_steps 10 --ext evaluation
```
* `--res_name`: model name of `residual transformer`.
* `--name`: model name of `masked transformer`.
* `--cond_scale`: scale of classifer-free guidance.
* `--time_steps`: number of iterations for inference.
* `--ext`: filename for saving evaluation results.
The final evaluation results will be saved in `./checkpoints/<dataset_name>/<name>/eval/<ext>.log`
</details>
## Acknowlegements
We sincerely thank the open-sourcing of these works where our code is based on:
[deep-motion-editing](https://github.com/DeepMotionEditing/deep-motion-editing), [Muse](https://github.com/lucidrains/muse-maskgit-pytorch), [vector-quantize-pytorch](https://github.com/lucidrains/vector-quantize-pytorch), [T2M-GPT](https://github.com/Mael-zys/T2M-GPT), [MDM](https://github.com/GuyTevet/motion-diffusion-model/tree/main) and [MLD](https://github.com/ChenFengYe/motion-latent-diffusion/tree/main)
## License
This code is distributed under an [MIT LICENSE](https://github.com/EricGuo5513/momask-codes/tree/main?tab=MIT-1-ov-file#readme).
Note that our code depends on other libraries, including SMPL, SMPL-X, PyTorch3D, and uses datasets which each have their own respective licenses that must also be followed. |