Website | Models 🤗 | Datasets 🤗 | Gradio demo | Notebooks
## Get started
### Creating the environment
We recommend using `conda` to create the environment
```
conda create --name genrl python=3.10
conda activate genrl
pip install -r requirements.txt
```
### Downloading InternVideo2
Download InternVideo 2 [[here]](https://huggingface.co/OpenGVLab/InternVideo2-Stage2_1B-224p-f4/blob/main/InternVideo2-stage2_1b-224p-f4.pt).
Place in the `models` folder.
Note: the file access is restricted, so you'll need an HuggingFace account to request access to the file.
Note: By default, the code expects the model to be placed in the `models` folder. The variable `MODELS_ROOT_PATH` indicating where the model should be place is set in `tools/genrl_utils.py`.
## Data
### Download datasets
The datasets used to pre-trained the models can be downloaded [[here]](https://huggingface.co/datasets/mazpie/genrl_datasets).
The file are `tar.gz` and can be extracted using the `tar` utility on Linux. For example:
```
tar -zxvf walker_data.tar.gz
```
### Collecting and pre-processing data
If you don't want to download our datasets, you collect and pre-process the data on your own.
Data can be collected running a DreamerV3 agent on a task, by running:
```
python3 collect_data.py agent=dreamer task=stickman_walk
```
or the Plan2Explore agent, by running:
```
python3 collect_data.py agent=plan2explore conf/defaults=dreamer_v2 task=stickman_walk
```
A repo for the experiment will be created under the directory `exp_local`, such as: `exp_local/YYYY.MM.DD/HHMMSS_agentname`. The data can then be found in the `buffer` subdirectory.
After obtaining the data, it should be processed to obtain the video embeddings for each frame sequence in the episodes. The processing can be done by running:
```
python3 process_dataset.py dataset_dir=data/stickman_example
```
where `data/stickman_example` is replaced by the folder of the data you want to process.
## Agents
### Downloading pre-trained models
If you want to test our work, without having to pre-train the models, you can do this by using our pre-trained models.
Pretrained models can be found [[here]](https://huggingface.co/mazpie/genrl_models)
Here's a snippet to download them easily:
```
import os
from huggingface_hub import hf_hub_download
def download_model(model_folder, model_filename):
REPO_ID = 'mazpie/genrl_models'
filename_list = [model_filename]
if not os.path.exists(model_folder):
os.makedirs(model_folder)
for filename in filename_list:
local_file = os.path.join(model_folder, filename)
if not os.path.exists(local_file):
hf_hub_download(repo_id=REPO_ID, filename=filename, local_dir=model_folder, local_dir_use_symlinks=False)
download_model('models', 'genrl_stickman_500k_2.pt')
```
Pre-trained models can be used by setting `snapshot_load_dir=...` when running `train.py`.
Note: the pre-trained models are not trained to solve any tasks. They only contain a pre-trained multimodal foundation world model (world model + connector and aligner).
### Training multimodal foundation world models
In order to train a multimodal foundation world model from data, you should run something like:
```
# Note: frames = update steps
python3 train.py task=stickman_walk replay_load_dir=data/stickman_example num_train_frames=500_010 visual_every_frames=25_000 train_world_model=True train_connector=True reset_world_model=True reset_connector=True
```
### Behavior learning
After pre-training a model, you can train the behavior for a task using:
```
python3 train.py task=stickman_walk snapshot_load_dir=models/genrl_stickman_500k_2.pt num_train_frames=50_010 batch_size=32 batch_length=32 agent.imag_reward_fn=video_text_reward eval_modality=task_imag
```
Data-free RL can be performed by additionaly passing the option:
`train_from_data=False`
The prompts for each task can be found and edited in `tools/genrl_utils.py`. However, you can also pass a custom prompt for a task by passing the option:
`+agent.imag_reward_args.task_prompt=custom_prompt`
## Other utilities
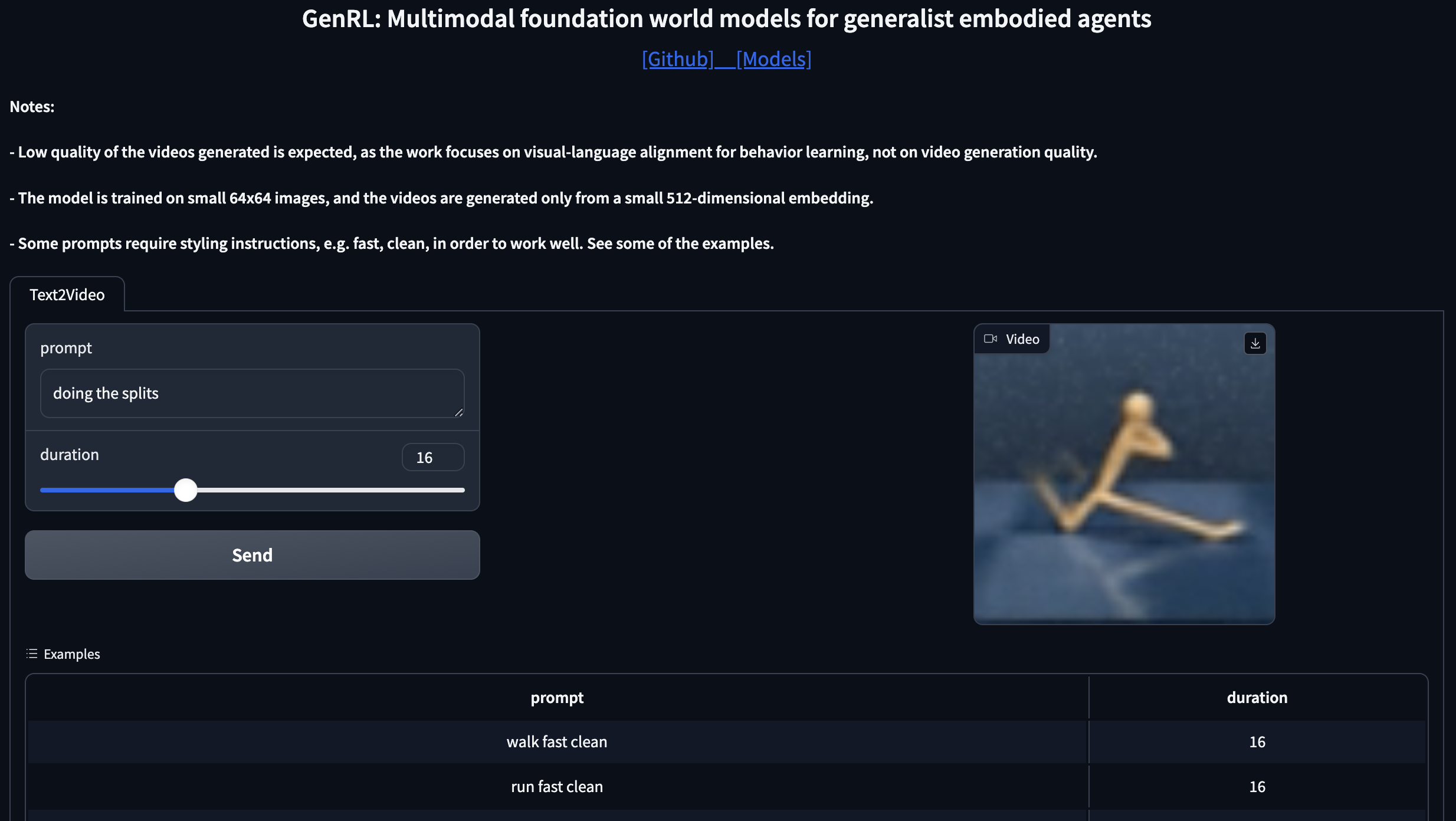
### Gradio demo
There's a gradio demo that can be found at `demo/app.py`.
If launching demo like a standard Python program with:
```
python3 demo/app.py
```
it will return a local endpoint (e.g. http://127.0.0.1:7860) where to access a dashboard to play with GenRL.