|
--- |
|
library_name: transformers |
|
license: apache-2.0 |
|
language: |
|
- en |
|
pipeline_tag: object-detection |
|
tags: |
|
- object-detection |
|
- vision |
|
datasets: |
|
- coco |
|
widget: |
|
- src: >- |
|
https://huggingface.co/datasets/mishig/sample_images/resolve/main/savanna.jpg |
|
example_title: Savanna |
|
- src: >- |
|
https://huggingface.co/datasets/mishig/sample_images/resolve/main/football-match.jpg |
|
example_title: Football Match |
|
- src: >- |
|
https://huggingface.co/datasets/mishig/sample_images/resolve/main/airport.jpg |
|
example_title: Airport |
|
--- |
|
|
|
|
|
# Model Card for RT-DETR |
|
|
|
|
|
## Table of Contents |
|
|
|
1. [Model Details](#model-details) |
|
2. [Model Sources](#model-sources) |
|
3. [How to Get Started with the Model](#how-to-get-started-with-the-model) |
|
4. [Training Details](#training-details) |
|
5. [Evaluation](#evaluation) |
|
6. [Model Architecture and Objective](#model-architecture-and-objective) |
|
7. [Citation](#citation) |
|
|
|
|
|
## Model Details |
|
|
|
 |
|
|
|
> The YOLO series has become the most popular framework for real-time object detection due to its reasonable trade-off between speed and accuracy. |
|
However, we observe that the speed and accuracy of YOLOs are negatively affected by the NMS. |
|
Recently, end-to-end Transformer-based detectors (DETRs) have provided an alternative to eliminating NMS. |
|
Nevertheless, the high computational cost limits their practicality and hinders them from fully exploiting the advantage of excluding NMS. |
|
In this paper, we propose the Real-Time DEtection TRansformer (RT-DETR), the first real-time end-to-end object detector to our best knowledge that addresses the above dilemma. |
|
We build RT-DETR in two steps, drawing on the advanced DETR: |
|
first we focus on maintaining accuracy while improving speed, followed by maintaining speed while improving accuracy. |
|
Specifically, we design an efficient hybrid encoder to expeditiously process multi-scale features by decoupling intra-scale interaction and cross-scale fusion to improve speed. |
|
Then, we propose the uncertainty-minimal query selection to provide high-quality initial queries to the decoder, thereby improving accuracy. |
|
In addition, RT-DETR supports flexible speed tuning by adjusting the number of decoder layers to adapt to various scenarios without retraining. |
|
Our RT-DETR-R50 / R101 achieves 53.1% / 54.3% AP on COCO and 108 / 74 FPS on T4 GPU, outperforming previously advanced YOLOs in both speed and accuracy. |
|
We also develop scaled RT-DETRs that outperform the lighter YOLO detectors (S and M models). |
|
Furthermore, RT-DETR-R50 outperforms DINO-R50 by 2.2% AP in accuracy and about 21 times in FPS. |
|
After pre-training with Objects365, RT-DETR-R50 / R101 achieves 55.3% / 56.2% AP. The project page: this [https URL](https://zhao-yian.github.io/RTDETR/). |
|
|
|
|
|
|
|
This is the model card of a 🤗 [transformers](https://huggingface.co/docs/transformers/index) model that has been pushed on the Hub. |
|
|
|
- **Developed by:** Yian Zhao and Sangbum Choi |
|
- **Funded by:** National Key R&D Program of China (No.2022ZD0118201), Natural Science Foundation of China (No.61972217, 32071459, 62176249, 62006133, 62271465), |
|
and the Shenzhen Medical Research Funds in China (No. |
|
B2302037). |
|
- **Shared by:** Sangbum Choi |
|
- **Model type:** [RT-DETR](https://huggingface.co/docs/transformers/main/en/model_doc/rt_detr) |
|
- **License:** Apache-2.0 |
|
|
|
### Model Sources |
|
|
|
<!-- Provide the basic links for the model. --> |
|
|
|
- **HF Docs:** [RT-DETR](https://huggingface.co/docs/transformers/main/en/model_doc/rt_detr) |
|
- **Repository:** https://github.com/lyuwenyu/RT-DETR |
|
- **Paper:** https://arxiv.org/abs/2304.08069 |
|
- **Demo:** [RT-DETR Tracking](https://huggingface.co/spaces/merve/RT-DETR-tracking-coco) |
|
|
|
## How to Get Started with the Model |
|
|
|
Use the code below to get started with the model. |
|
|
|
```python |
|
import torch |
|
import requests |
|
|
|
from PIL import Image |
|
from transformers import RTDetrForObjectDetection, RTDetrImageProcessor |
|
|
|
url = 'http://images.cocodataset.org/val2017/000000039769.jpg' |
|
image = Image.open(requests.get(url, stream=True).raw) |
|
|
|
image_processor = RTDetrImageProcessor.from_pretrained("PekingU/rtdetr_r18vd") |
|
model = RTDetrForObjectDetection.from_pretrained("PekingU/rtdetr_r18vd") |
|
|
|
inputs = image_processor(images=image, return_tensors="pt") |
|
|
|
with torch.no_grad(): |
|
outputs = model(**inputs) |
|
|
|
results = image_processor.post_process_object_detection(outputs, target_sizes=torch.tensor([image.size[::-1]]), threshold=0.3) |
|
|
|
for result in results: |
|
for score, label_id, box in zip(result["scores"], result["labels"], result["boxes"]): |
|
score, label = score.item(), label_id.item() |
|
box = [round(i, 2) for i in box.tolist()] |
|
print(f"{model.config.id2label[label]}: {score:.2f} {box}") |
|
``` |
|
This should output |
|
``` |
|
sofa: 0.97 [0.14, 0.38, 640.13, 476.21] |
|
cat: 0.96 [343.38, 24.28, 640.14, 371.5] |
|
cat: 0.96 [13.23, 54.18, 318.98, 472.22] |
|
remote: 0.95 [40.11, 73.44, 175.96, 118.48] |
|
remote: 0.92 [333.73, 76.58, 369.97, 186.99] |
|
``` |
|
|
|
## Training Details |
|
|
|
### Training Data |
|
|
|
<!-- This should link to a Dataset Card, perhaps with a short stub of information on what the training data is all about as well as documentation related to data pre-processing or additional filtering. --> |
|
|
|
The RTDETR model was trained on [COCO 2017 object detection](https://cocodataset.org/#download), a dataset consisting of 118k/5k annotated images for training/validation respectively. |
|
|
|
### Training Procedure |
|
|
|
<!-- This relates heavily to the Technical Specifications. Content here should link to that section when it is relevant to the training procedure. --> |
|
|
|
We conduct experiments on COCO and Objects365 datasets, where RT-DETR is trained on COCO train2017 and validated on COCO val2017 dataset. |
|
We report the standard COCO metrics, including AP (averaged over uniformly sampled IoU thresholds ranging from 0.50-0.95 with a step size of 0.05), |
|
AP50, AP75, as well as AP at different scales: APS, APM, APL. |
|
|
|
### Preprocessing |
|
|
|
Images are resized to 640x640 pixels and rescaled with `image_mean=[0.485, 0.456, 0.406]` and `image_std=[0.229, 0.224, 0.225]`. |
|
|
|
### Training Hyperparameters |
|
|
|
- **Training regime:** <!--fp32, fp16 mixed precision, bf16 mixed precision, bf16 non-mixed precision, fp16 non-mixed precision, fp8 mixed precision --> |
|
|
|
 |
|
|
|
|
|
## Evaluation |
|
|
|
|
|
| Model | #Epochs | #Params (M) | GFLOPs | FPS_bs=1 | AP (val) | AP50 (val) | AP75 (val) | AP-s (val) | AP-m (val) | AP-l (val) | |
|
|----------------------------|---------|-------------|--------|----------|--------|-----------|-----------|----------|----------|----------| |
|
| RT-DETR-R18 | 72 | 20 | 60.7 | 217 | 46.5 | 63.8 | 50.4 | 28.4 | 49.8 | 63.0 | |
|
| RT-DETR-R34 | 72 | 31 | 91.0 | 172 | 48.5 | 66.2 | 52.3 | 30.2 | 51.9 | 66.2 | |
|
| RT-DETR R50 | 72 | 42 | 136 | 108 | 53.1 | 71.3 | 57.7 | 34.8 | 58.0 | 70.0 | |
|
| RT-DETR R101| 72 | 76 | 259 | 74 | 54.3 | 72.7 | 58.6 | 36.0 | 58.8 | 72.1 | |
|
| RT-DETR-R18 (Objects 365 pretrained) | 60 | 20 | 61 | 217 | 49.2 | 66.6 | 53.5 | 33.2 | 52.3 | 64.8 | |
|
| RT-DETR-R50 (Objects 365 pretrained) | 24 | 42 | 136 | 108 | 55.3 | 73.4 | 60.1 | 37.9 | 59.9 | 71.8 | |
|
| RT-DETR-R101 (Objects 365 pretrained) | 24 | 76 | 259 | 74 | 56.2 | 74.6 | 61.3 | 38.3 | 60.5 | 73.5 | |
|
|
|
|
|
|
|
### Model Architecture and Objective |
|
|
|
 |
|
|
|
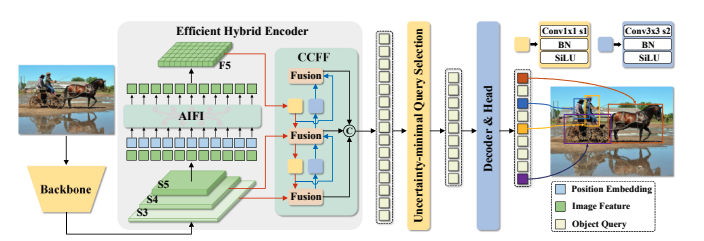
Overview of RT-DETR. We feed the features from the last three stages of the backbone into the encoder. The efficient hybrid |
|
encoder transforms multi-scale features into a sequence of image features through the Attention-based Intra-scale Feature Interaction (AIFI) |
|
and the CNN-based Cross-scale Feature Fusion (CCFF). Then, the uncertainty-minimal query selection selects a fixed number of encoder |
|
features to serve as initial object queries for the decoder. Finally, the decoder with auxiliary prediction heads iteratively optimizes object |
|
queries to generate categories and boxes. |
|
|
|
|
|
## Citation |
|
|
|
<!-- If there is a paper or blog post introducing the model, the APA and Bibtex information for that should go in this section. --> |
|
|
|
**BibTeX:** |
|
|
|
```bibtex |
|
@misc{lv2023detrs, |
|
title={DETRs Beat YOLOs on Real-time Object Detection}, |
|
author={Yian Zhao and Wenyu Lv and Shangliang Xu and Jinman Wei and Guanzhong Wang and Qingqing Dang and Yi Liu and Jie Chen}, |
|
year={2023}, |
|
eprint={2304.08069}, |
|
archivePrefix={arXiv}, |
|
primaryClass={cs.CV} |
|
} |
|
``` |
|
|
|
## Model Card Authors |
|
|
|
[Sangbum Choi](https://huggingface.co/danelcsb) |
|
[Pavel Iakubovskii](https://huggingface.co/qubvel-hf) |
|
|
|
|

