
hoang-quoc-trung/sumen-base
Image-to-Text
•
Updated
•
264
•
4
image_filename
stringlengths 5
40
| latex
stringlengths 1
27.2k
|
|---|---|
39928.png | \Lambda _ { W } ^ { ( 0 ) } ( \zeta ; r ) = 1 , \qquad \Lambda _ { W } ^ { ( 1 ) } ( \zeta ; r ) = \Lambda ( \zeta ; r ) = \frac { \Theta _ { q ^ { 4 } } ( r \zeta ^ { 2 } ) \Theta _ { q ^ { 4 } } ( q ^ { 2 } r \zeta ^ { - 2 } ) } { \Theta _ { q ^ { 4 } } ( r \zeta ^ { - 2 } ) \Theta _ { q ^ { 4 } } ( q ^ { 2 } r \zeta ^ { 2 } ) } \zeta ^ { - 2 } , |
54368.png | { \hat { \delta } } { { \overline { { \eta } } } ^ { a } } = - \partial _ { \mu } A ^ { a \mu } \delta \varsigma |
83904690-93db-42f1-81d0-d60cb7981cf9.jpg | \operatorname* { l i m } _ { w \to 9 ^ { + } } \frac { 5 + - \tan ^ { 0 } { w } } { \tan { w } + w \cos ^ { 2 } { w } } |
132b8135-e8e6-45d4-a2dc-2596f9e95e84.jpg | \operatorname* { l i m } _ { s \to \infty } \frac { 9 2 \ln { s } } { \sqrt { x } } |
41328712-67d5-4692-8577-03077eff4ea7.jpg | \operatorname* { l i m } _ { v \to 2 } \frac { 9 + \tan { v } } { 8 + - 5 \cos ^ { 2 } { v } } |
31055.png | A d S _ { 3 } \Longleftrightarrow | v a c \rangle _ { i n } \equiv | 0 \rangle _ { i n } \otimes | 0 \rangle _ { i n } . |
d9b79a12-5407-42b4-a35a-d45deb5c9148.jpg | \operatorname* { l i m } _ { x \to 7 ^ { - } } \sqrt { 5 5 + - 2 x ^ { 1 } } |
4bde89d7-446e-4cd7-8e03-5a14a754ab0c.jpg | \operatorname* { l i m } _ { w \to 5 } \frac { 3 + \tan { w } } { 7 + - 3 \sin ^ { 3 } { w } } |
35008.png | \langle \bar { y } _ { f } , t | y _ { i } , 0 \rangle = e ^ { i S _ { c l } } |
138d3532-43a6-40cf-bc84-222924e19905.jpg | \operatorname* { l i m } _ { r \to \pi / 3 } \tan ^ { 2 } { r } + \operatorname* { l i m } _ { r \to \pi / 2 } \cos ^ { 5 } { r } |
918d6b72-7141-4b68-abf3-dacec97804ae.jpg | \operatorname* { l i m } _ { g \to \infty } 3 / 9 |
5b8178a8-cf03-467f-bd9c-028a0231252d.jpg | \operatorname* { l i m } _ { u \to 8 ^ { + } } \frac { \cot { u } } { u } \operatorname* { l i m } _ { u \to 3 ^ { + } } \sqrt { u \left( 4 + - 8 u \right) } |
da651d5a-b6c4-48e9-b5a8-bb83b5270b37.jpg | \operatorname* { l i m } _ { p \to \pi } \frac { \frac { d } { d p } \left( \sin { p } + 8 \right) } { \frac { d } { d p } \left( p + \left( - 7 \pi \right) ^ { 9 } \right) } |
25591.png | G _ { L } ^ { \pm } ( z ) V _ { L } ^ { ( - 1 , - 1 ) } ( 0 ) \sim { \frac { 1 } { z } } \left( V _ { L } ^ { ( 0 , - 1 ) } ( 0 ) , \, V _ { L } ^ { ( - 1 , 0 ) } ( 0 ) \right) \ , |
50987.png | \mu = \mu _ { e f f } \equiv \frac { \langle A \rangle } { ( \langle A ^ { 2 } \rangle - \langle A \rangle ^ { 2 } ) } |
8bb5fa59-9fac-476d-9636-ced083a3ede6.jpg | e ^ { \operatorname* { l i m } _ { h \to 4 ^ { + } } \frac { \frac { 2 } { h + 3 } } { \tan { h } } } |
29050.png | \pm v _ { t } ( t , x ) + v _ { x x x } ( t , x ) - 6 v ^ { 2 } ( t , x ) v _ { x } ( t , x ) = 0 , \ll { m k d v } |
44290.png | \Delta c _ { \mathrm { { e f f } } } = \mp \begin{array} { c } { \frac { 1 } { y } } \end{array} \, , \quad \mathrm { a n d } \quad \Delta c _ { \mathrm { { e f f } } } = \pm \begin{array} { c } { \frac { 1 } { 2 y } } \end{array} \, , |
93530.png | E _ { _ \mathrm { ( g s ) } } = - \frac { \hbar ^ { 2 } \Lambda ^ { 2 } } { 2 M } \, \frac { 1 } { e ^ { 4 \pi / \lambda } - 1 } \sim - \frac { \hbar ^ { 2 } \Lambda ^ { 2 } } { 2 M } \, e ^ { - 4 \pi / \lambda } \, . |
15552.png | V ( \phi , \beta ) = 2 \mu ^ { D } \sum _ { s = 1 } ^ { \infty } a ^ { \frac { D } { 2 } - s } f ( D , s ) ( \gamma + g \phi ) ^ { 2 s } \zeta ( 2 s - d , \frac { 1 } { 2 } ) . |
2c4c625c-eaf3-4e8c-8a09-5d15cb7bdb58.jpg | \operatorname* { l i m } _ { h \to 1 } \frac { \left( h - 8 \right) \left( h ^ { 4 } + 6 h ^ { 9 } + 0 h ^ { 3 } + h + 4 4 \right) } { h - 7 } |
c12de2f1-44a8-4d10-aa5f-1b85dd0fcf15.jpg | \operatorname* { l i m } _ { r \to 1 ^ { + } } \frac { 1 + - 2 \cos ^ { 2 } { r } } { \sin { r } + r \cos ^ { 2 } { r } } |
75_caue.bmp | c ^ { 2 } = a ^ { 2 } + b ^ { 2 } - 2 a b \cos C |
c194b56b-aeb8-41cd-9872-c439089c3b99.jpg | \operatorname* { l i m } _ { h \to \pi / 5 } \sec ^ { 2 } { h } + \operatorname* { l i m } _ { h \to \pi / 7 } \tan ^ { 2 } { h } |
72e5229c-64a1-4497-b5f4-675ec7778644.jpg | \frac { 7 } { 7 } \operatorname* { l i m } _ { v \to 6 } \frac { \sin { \left( 2 v \right) } } { 9 v } |
d367cf7e-bf44-4646-aa5e-c2d77a147a51.jpg | \operatorname* { l i m } _ { c \to - 4 } \frac { 3 } { c + 7 } \operatorname* { l i m } _ { c \to 7 } \frac { \sin { \left( c + 3 \right) } } { c + 4 } |
52052.png | \begin{array} { l c l } { t _ { \sigma ^ { + } } \left( \sigma ^ { + } \right) } & { = } & { 0 } \\ { t _ { \sigma ^ { - } } \left( \sigma ^ { - } = - \infty \right) } & { = } & { 0 \; . } \end{array} |
fe5d1105-55e9-4c47-87d9-cfe14e1a28b1.jpg | \operatorname* { l i m } _ { h \to \infty } \sin ^ { h ^ { 6 } } \frac { 6 } { h ^ { 9 } } |
200926-131-31.bmp | \frac { - b - \sqrt { b ^ { 2 } - 4 a c } } { 2 a } |
200923-1251-103.bmp | \sum t - \lambda |
17360.png | \tilde { w } _ { 1 } = B _ { - 6 } \oplus B _ { - 8 } \oplus B _ { - 9 } |
36e2fe1e-bda0-4b5d-99cc-3736f1120a5d.jpg | \frac { 9 } { 8 } \operatorname* { l i m } _ { t \to \infty } \frac { - 3 \frac { \sin { \frac { 6 } { t } } } { t ^ { 7 } } } { - 6 t ^ { - 6 } } |
77858.png | H ( x , z , \bar { z } ) = H ( \infty ) + \sum _ { j } \frac { 1 } { \sqrt { | z - z _ { j } | ^ { 2 } + ( x - x _ { j } ) ^ { 2 } / \Omega } } . |
a43ac871-76fb-452d-8857-c7901fbc6675.jpg | \operatorname* { l i m } _ { h \to 5 ^ { + } } \frac { - 3 \cos { h } \sin ^ { 1 } { h } } { \tan ^ { 1 } { h } + \left( 7 h \sin { h } + 3 \right) \tan ^ { 3 } { h } } |
52da2f39-10b9-48ed-b686-5fe8371ba582.jpg | \operatorname* { l i m } _ { z \to 2 ^ { + } } \frac { - 7 \sin { z } \sin ^ { 9 } { z } } { \left( 2 + 2 z \sin { z } \right) \sin ^ { 3 } { z } } |
55378.png | q = p \omega , \mathrm { \hspace { 4 m m } } \omega ^ { r } = 1 , \omega \neq 1 . |
59597.png | M _ { i j } ^ { k } = x _ { i } T _ { j } ^ { k } - x _ { j } T _ { i } ^ { k } , |
10198.png | \Sigma ( 0 ) = - \frac { { \lambda } ^ { 2 } } { 3 ! } \int d ^ { 2 } x \, [ G _ { E } ( x ) ] ^ { 3 } |
fc2a6ccc-1078-4a51-a08b-2d458df04282.jpg | \operatorname* { l i m } _ { k \to \pi / 4 } \sin ^ { 5 } { k } + \operatorname* { l i m } _ { k \to \pi / 5 } \sec ^ { 8 } { k } |
77fd6235-367e-4296-8e44-e40864129410.jpg | = \operatorname* { l i m } _ { k \to \infty } \frac { \log _ { 6 1 } { k } } { \log _ { 4 1 } { 7 } } \frac { \log _ { 7 1 } { 3 } } { \log _ { 1 2 } { k } } |
63707.png | \Lambda = \left( \begin{array} { c c } { e ^ { - \varphi _ { 0 } / 2 } } & { \chi _ { 0 } \, e ^ { \varphi _ { 0 } / 2 } } \\ { 0 } & { e ^ { \varphi _ { 0 } / 2 } } \end{array} \right) ~ ~ . |
78804.png | \frac { Z _ { 1 } } { Z _ { 3 } } = \frac { Z _ { 4 } } { Z _ { 1 } } . |
bda4de50-f9bb-43f3-a995-bf4bf412ffec.jpg | \operatorname* { l i m } _ { w \to 9 ^ { + } } \frac { 9 / w } { - 4 \tan { w } \tan { w } } |
93a3ddcf-e2c6-4b75-a5a3-2c64b2bceee2.jpg | \operatorname* { l i m } _ { b \to \pi / 2 } \frac { \sec ^ { 2 } { b } + \sec ^ { 8 } { b } } { 9 } |
56864.png | K = 4 L _ { 2 } ^ { + } L _ { 2 } - G _ { 0 } G _ { 0 } + 2 G _ { 0 } , |
1e5bde51-6eed-4db3-86bc-f63d1879f324.jpg | \operatorname* { l i m } _ { y \to \pi / 2 ^ { - } } 7 / 7 \csc ^ { 2 } { y } \left( 5 y + \left( - 6 \pi \right) ^ { 9 } \right) |
e03976bd-5791-432f-a7a1-f4f95b02f0ef.jpg | \operatorname* { l i m } _ { a \to \infty } \frac { \log _ { 6 8 } { 5 } } { \log _ { 3 2 } { 0 } } |
5d9a0d9f-56df-4e45-ab14-93f938d7d92d.jpg | \frac { 4 } { 2 } \operatorname* { l i m } _ { t \to \infty } \frac { \frac { 8 \tan { \frac { 7 } { t } } } { t ^ { 6 } } } { \frac { - 5 } { t ^ { 4 } } } |
d7c6ff5c-3feb-4e55-9b4b-1784fe86213a.jpg | \operatorname* { l i m } _ { y \to \pi / 2 } \frac { 9 \tan ^ { 9 } { y } + 8 \tan ^ { 3 } { y } } { 9 } |
af3b5db0-87c3-4165-99aa-0ec67906af52.jpg | \operatorname* { l i m } _ { t \to \frac { \pi } { 3 } } \frac { 9 \cos ^ { 2 } { t } + 5 \cos ^ { 4 } { t } } { 2 } |
e7ed7950-84e9-433d-97d8-c61fcfd00ae0.jpg | \operatorname* { l i m } _ { z \to \infty } \frac { \left| z \right| } { 2 z + 1 } |
2df74f64-1297-41c1-b49b-2eeabef7267b.jpg | \operatorname* { l i m } _ { r \to 3 } \frac { 2 \tan { \left( 4 r \right) } } { 6 r \sin { \left( 6 r \right) } } |
64203.png | + ( Q _ { ( 1 ) } + Q _ { ( 2 ) } ) [ b _ { - 1 } ^ { ( 2 ) } | \chi \rangle ^ { ( 1 ) } | \downarrow \rangle ^ { ( 2 ) } - b _ { - 1 } ^ { ( 1 ) } | \chi \rangle ^ { ( 2 ) } | \downarrow \rangle ^ { ( 1 ) } ] \mathrm { \Large { \} } } |
62967.png | \mathrm { d } s ^ { 2 } = - ( \mathrm { d } x ^ { 0 } ) ^ { 2 } + ( \mathrm { d } x ^ { I } ) ^ { 2 } \ , |
78121.png | S : = t ^ { \alpha } \Sigma _ { \alpha } , \qquad S ^ { \star } : = t _ { \alpha } \, \eta ^ { \alpha \beta } \Sigma _ { \beta } = t ^ { \star \alpha } \Sigma _ { \alpha } . |
86804.png | y ^ { \prime \prime } - m ^ { 2 } y = { \frac { \mu ^ { 2 } } { 2 r ^ { 3 } } } { \frac { d ( F ( \phi ) ) } { d \phi } } , |
101877.png | Z ( \mathcal { K } ) = \left\langle b \right| T \exp \left[ - \int _ { 0 } ^ { \infty } d t \, H ( \mathcal { K } ) \right] \left| a \right\rangle , |
formulaire013-equation049.bmp | \frac { e ^ { i a t } } { n } \sum _ { k = 0 } ^ { n - 1 } e ^ { i k t } |
1d4818e0-6064-4b02-8566-cd5e9356bacc.jpg | \operatorname* { l i m } _ { \theta \to \pi / 4 } \frac { \sin ^ { 4 } { \theta } + \tan ^ { 2 } { \theta } } { 8 } |
84283.png | { \cal K } = - \ln ( - i v ^ { t } q ^ { - 1 } \bar { v } ) , |
400998da-cb63-4104-ae84-b4f6b4e12a4b.jpg | \operatorname* { l i m } _ { h \to 5 ^ { + } } h ^ { \sin { h } } |
c9a459b3-fe92-4698-b71c-b6336cf7f05d.jpg | \operatorname* { l i m } _ { t \to \pi / 9 ^ { - } } \frac { \cos { t } - 4 } { \cos { t } } |
20751.png | \overline { { U ( \psi , z ) \chi } } = U ( \overline { \psi } , - z ^ { \ast } ) \chi \, . |
85307803-fca1-44ca-982d-35f3f632b5bc.jpg | \operatorname* { l i m } _ { y \to - \infty } \frac { 5 y + 4 } { 9 y ^ { 9 } - 6 } |
93bc79fc-f831-467e-88ea-58ca1f6ee2bd.jpg | \operatorname* { l i m } _ { x \to 1 } \frac { \frac { d } { d x } e ^ { x } + - 4 \frac { d } { d x } \tan { x } + - \frac { d } { d x } 2 } { \frac { d } { d x } x ^ { 5 } + \frac { d } { d x } 2 x ^ { 5 } + \frac { d } { d x } 2 x ^ { 4 } } |
83821.png | Q _ { p } ^ { ( \pm ) } { } ~ \equiv { } ~ \prod _ { i = 1 } ^ { p } \oint { \frac { \mathrm { d } z _ { i } } { 2 \pi i } } { } ~ { S ^ { \pm } } ( z _ { i } ) { } ~ , |
74741.png | { \cal I } ( { \cal K } , \Gamma ) = \{ V \in { \cal B } ( { \cal K } ) \, | \, [ V , \Gamma ] = 0 , \, \, V ^ { * } V = { \bf 1 } \} |
0c29222f-217b-46bc-a80b-f8506e969c68.jpg | \operatorname* { l i m } _ { t \to \pi / 4 } \frac { \cos { t } + - 4 \sin { t } } { t + - 2 \pi / 3 } |
9142.png | { \cal F } _ { \mu \nu } \equiv H _ { \mu \nu 5 } = F _ { \mu \nu } + \partial _ { 5 } B _ { \mu \nu } . |
39738.png | \frac { \partial V _ { e f f } } { \partial \chi } = \frac { 1 } { 8 \pi \chi } \left[ \chi - m ^ { 2 } - \lambda _ { r } \left( \phi ^ { 2 } + \frac { 1 } { 4 \pi } { \ln } [ \frac { m ^ { 2 } } { \chi } ] \right) - \eta \left( \phi ^ { 2 } + \frac { 1 } { 4 \pi } { \ln } [ \frac { m ^ { 2 } } { \chi } ] \right) ^ { 2 } \right] |
62839.png | \left[ J _ { 3 } , J ^ { \pm } \right] = \pm J ^ { \pm } ~ ~ , ~ ~ ~ ~ \left[ J ^ { + } , J ^ { - } \right] = - R \left( J _ { 3 } + \frac { 1 } { 2 } \right) ~ ~ . |
100522.png | f _ { 0 } \gamma ^ { 2 } = f _ { \infty } v _ { 0 } ^ { 2 } \; \; \; \; \; \; \; \gamma ^ { 2 } \pm 2 \gamma = - 2 f _ { \infty } ^ { 2 } |
2cb376b3-1885-402e-a49b-68891daa7ec4.jpg | \operatorname* { l i m } _ { z \to 7 } \frac { 2 + \sin { z } } { \tan ^ { 7 } { z } } |
53931.png | \tilde { a } ^ { a } : = i ( p ^ { \theta a } - i \theta ^ { a } ) , \quad \tilde { \tilde { a } } { } ^ { a } : = - ( p ^ { \theta a } + i \theta ^ { a } ) , |
12e41a46-decf-4f93-be8b-7eeb5f4516d2.jpg | \operatorname* { l i m } _ { p \to \frac { \pi } { 3 } } \cos ^ { 2 } { p } + \tan ^ { 6 } { p } |
97523c2f-b7eb-412c-968e-6bd6a6a20698.jpg | \operatorname* { l i m } _ { h \to 2 ^ { + } } \frac { 8 + - \tan ^ { 4 } { h } } { \tan { h } + h \cos ^ { 1 } { h } } |
71569.png | \langle N \rangle _ { 0 } = \frac { 1 } { 8 \pi } \, \int d ^ { 2 } x \, \epsilon ^ { a b c } \, \epsilon ^ { i j } \, \hat { n } ^ { a } \, \partial _ { i } \hat { n } ^ { b } \, \partial _ { j } \hat { n } ^ { c } |
44003.png | \{ f , g \} _ { 1 } = \frac { \partial ^ { R } f } { \partial x ^ { A } } \Omega ^ { A B } \frac { \partial ^ { L } g } { \partial x ^ { B } } |
46187.png | \sum _ { m _ { k } } \frac { 1 } { N ( m _ { k } ) } Y ( m _ { k } ; \vartheta , \phi ) Y ^ { * } ( m _ { k } ; \vartheta ^ { \prime } , \phi ^ { \prime } ) = \frac { 2 l + n } { n S _ { D } } C _ { l } ^ { n / 2 } ( \cos \theta ) , |
UN_129_em_1044.bmp | - \frac { 9 9 2 0 } { 9 9 } |
94508.png | [ { \cal T } , { \cal U } ] + [ { \cal X } , { \cal V } ] = 0 , |
cf4f7393-f83e-404e-a7f1-ac7dc618002d.jpg | \operatorname* { l i m } _ { u \to \frac { \pi } { 3 } } \frac { 4 \tan { u } + - 6 \tan { u } } { 2 u + - 8 \frac { \pi } { 3 } } |
76269.png | \hat { B } ( x \rightarrow x ^ { \prime } ) \hat { A } ( y , x ) = \hat { A } ( y , x ^ { \prime } ) . |
36565.png | a _ { 0 } ( \vec { p } ) ^ { K } = - a _ { 0 } ( \vec { p } ) ^ { + } \quad , \quad a _ { j } ( \vec { p } ) ^ { K } = a _ { j } ( \vec { p } ) ^ { + } \quad , |
68634.png | \Theta ^ { m j } = \delta ^ { m j } S + \delta ^ { i m } \Theta ^ { j i } \, . |
7273a0cd-6cb1-4e9a-abc9-b2875118b751.jpg | \operatorname* { l i m } _ { r \to \pi / 4 ^ { - } } \sin { r } + - 6 \sec { r } |
36102.png | u _ { 0 } \rightarrow u u _ { 0 } , u _ { 1 } \rightarrow u u _ { 1 } , |
48498.png | E _ { ~ 0 } ^ { 0 } = { \frac { \kappa _ { 5 } ^ { ~ 2 } C _ { \phi } ^ { 2 } } { 4 a ^ { 6 } } } + { \frac { { \cal E } _ { 0 } } { a ^ { 4 } } } , |
80197.png | 0 \rightarrow S _ { t } ^ { n , m _ { 2 } + n _ { c } + l } \rightarrow S _ { t } ^ { n , m _ { 2 } + n _ { c } - l } |
dd417a77-2799-4107-8d2c-9358c2b7d1cd.jpg | \operatorname* { l i m } _ { s \to \infty } \frac { s ^ { 7 } } { 7 } |
421533ca-d847-4889-8d9e-7afbb3171e04.jpg | \frac { \operatorname* { l i m } _ { x \to 8 } \frac { d } { d x } 2 2 \sin { \left( 4 x \right) } \sin { \left( 6 x \right) } } { \operatorname* { l i m } _ { x \to 7 } \frac { d } { d x } x } |
1adb1a95-e152-4fa8-a342-0fe9fe5a7516.jpg | \operatorname* { l i m } _ { r \to 2 ^ { + } } 5 + r ^ { \sec { r } } |
81e9d59b-1b3e-4334-9101-16aad8ce9c7c.jpg | \operatorname* { l i m } _ { t \to 2 } \sqrt { \frac { 3 t + 9 6 } { 2 t - 5 } } |
43490.png | N = \left( \frac { 4 \pi } { 3 } \right) ^ { 2 } \left( \frac { R } { \Lambda } \right) ^ { 3 } \left( \frac { \epsilon - 1 } { 4 } \right) ^ { 2 } , |
e585514c-cee4-4d88-b28d-2f6ac463a2e0.jpg | \operatorname* { l i m } _ { x \to 7 } \frac { \frac { \sin { \left( 4 x \right) } } { \cos { \left( 2 x \right) } } } { x } |
13513.png | h ( q ) = c _ { 1 } \int _ { 0 } ^ { q } d q _ { 1 } e ^ { \int _ { 0 } ^ { q _ { 1 } } E ( q _ { 2 } ) d q _ { 2 } } + c _ { 2 } , |
e1496af6-943a-4a71-957d-3a5e8f5a61ca.jpg | \operatorname* { l i m } _ { x \to \frac { \pi } { 7 } } \sec ^ { 5 } { x } + \tan ^ { 5 } { x } |
71319.png | \left( \begin{array} { c } { \vec { F } ^ { ( 1 ) } } \\ { - \vec { F } ^ { ( 2 ) } } \end{array} \right) = \frac { 1 } { \sqrt { 2 } } \left( \begin{array} { c c } { 1 } & { 1 } \\ { - 1 } & { 1 } \end{array} \right) \left( \begin{array} { c } { \vec { F ^ { R } } } \\ { \vec { F } ^ { L } } \end{array} \right) \, . |
5f86e42e-ef9e-4ef9-9b32-c4729f3470f1.jpg | \operatorname* { l i m } _ { t \to \pi / 2 ^ { - } } 6 / 2 \cos ^ { 2 } { t } \left( 2 t + \left( - 3 \pi \right) ^ { 4 } \right) |
0249813b-40f3-4cf3-b6d6-a81bf2769b0c.jpg | 6 / 7 \operatorname* { l i m } _ { u \to 5 } \frac { \frac { \tan { \left( 3 u \right) } } { 4 u } } { \frac { \cot { \left( 7 u \right) } } { 8 u } } |
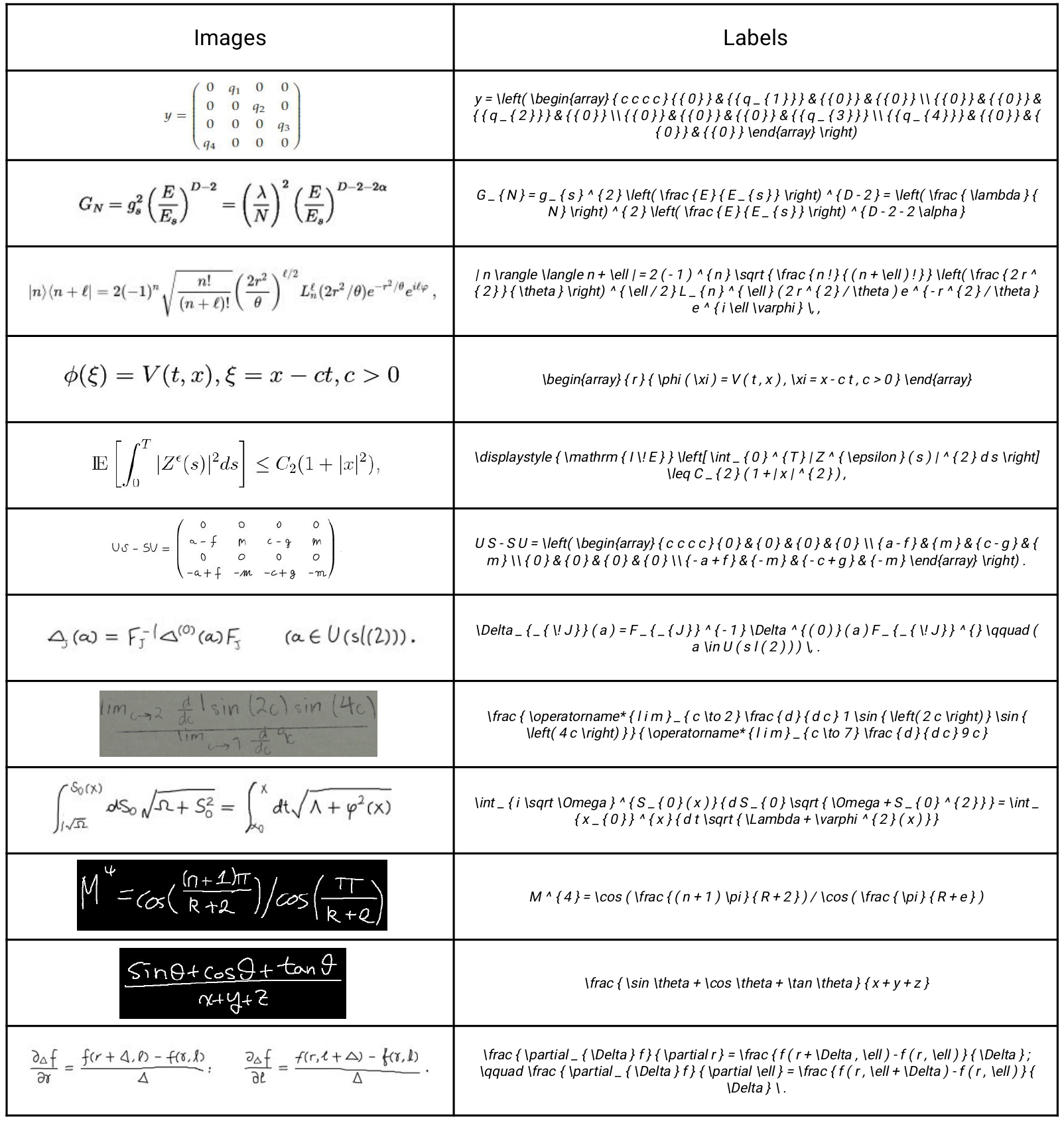
Collects and builds the largest dataset to date from online sources, creating a robust and generalizable dataset. This dataset includes approximately 3.4 million image-text pairs, including both handwritten mathematical expressions (200,330 examples) and printed mathematical expressions (3,237,250 examples). Due to the large dataset and the fact that the same mathematical formula can be represented in different LaTeX string formats in an image, it is easy to cause polymorphic ambiguity. To address this issue, we use the normalization method with KaTeX parser.
Reference [1]: Yuntian Deng, Anssi Kanervisto, and Alexander M. Rush. What you get is what you see: A visual markup decompiler. CoRR, abs/1609.04938, 2016. URL http://arxiv.org/abs/1609.04938.
[2]: Sumeet S. Singh. Teaching machines to code: Neural markup generation with visual attention. CoRR, abs/1802.05415, 2018. URL http://arxiv. org/abs/1802.05415.
[7]: Harold Mouch`ere, Christian Viard-Gaudin, Richard Zanibbi, and Utpal Garain. ICFHR 2014 competition on recognition of on-line handwritten mathematical expressions (CROHME 2014). In 14th International Conference on Frontiers in Handwriting Recognition, ICFHR 2014, Crete, Greece, September 1-4, 2014, pages 791–796. IEEE Computer Society, 2014. doi: 10.1109/ICFHR.2014.138. URL https: //doi.org/10.1109/ICFHR.2014.138.
[8]: Harold Mouch`ere, Christian Viard-Gaudin, Richard Zanibbi, and Utpal Garain. ICFHR2016 CROHME: competition on recognition of online handwritten mathematical expressions. In 15th International Conference on Frontiers in Handwriting Recognition, ICFHR 2016, Shenzhen, China, October 23-26, 2016, pages 607–612. IEEE Computer Society, 2016. doi: 10.1109/ICFHR.2016.0116. URL https: //doi.org/10.1109/ICFHR.2016.0116.
[9]: Mahshad Mahdavi, Richard Zanibbi, Harold Mouch`ere, Christian ViardGaudin, and Utpal Garain. ICDAR 2019 CROHME + TFD: competition on recognition of handwritten mathematical expressions and typeset formula detection. In 2019 International Conference on Document Analysis and Recognition, ICDAR 2019, Sydney, Australia, September 20-25,2019, pages 1533–1538. IEEE, 2019. doi: 10.1109/ICDAR.2019.00247. URL https://doi.org/10.1109/ICDAR.2019.00247. [10]: https://huggingface.co/datasets/Azu/Handwritten-Mathematical-Expression-Convert-LaTeX [11]: https://www.v7labs.com/open-datasets/aida