
From Points to Parts: 3D Object Detection from Point Cloud with Part-aware and Part-aggregation Network
Abstract
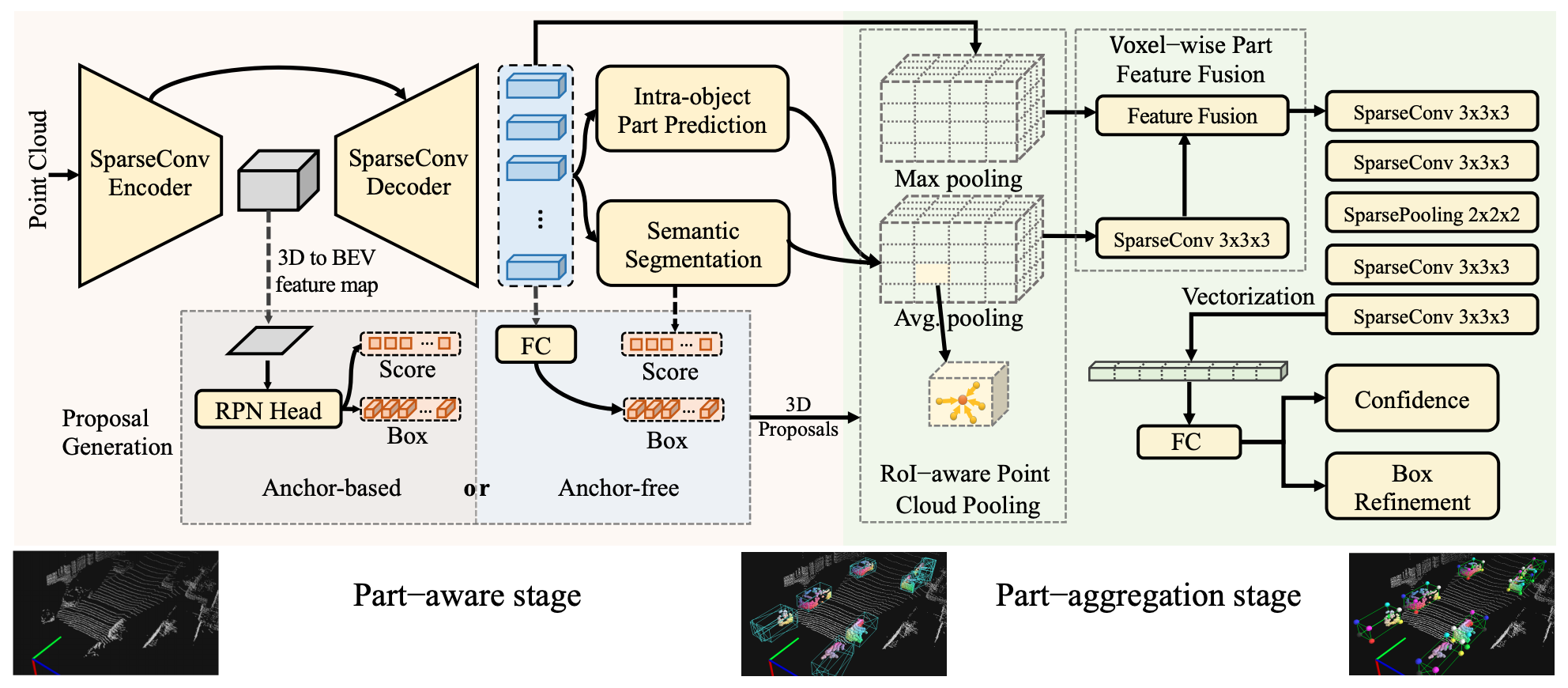
3D object detection from LiDAR point cloud is a challenging problem in 3D scene understanding and has many practical applications. In this paper, we extend our preliminary work PointRCNN to a novel and strong point-cloud-based 3D object detection framework, the part-aware and aggregation neural network (Part-A2 net). The whole framework consists of the part-aware stage and the part-aggregation stage. Firstly, the part-aware stage for the first time fully utilizes free-of-charge part supervisions derived from 3D ground-truth boxes to simultaneously predict high quality 3D proposals and accurate intra-object part locations. The predicted intra-object part locations within the same proposal are grouped by our new-designed RoI-aware point cloud pooling module, which results in an effective representation to encode the geometry-specific features of each 3D proposal. Then the part-aggregation stage learns to re-score the box and refine the box location by exploring the spatial relationship of the pooled intra-object part locations. Extensive experiments are conducted to demonstrate the performance improvements from each component of our proposed framework. Our Part-A2 net outperforms all existing 3D detection methods and achieves new state-of-the-art on KITTI 3D object detection dataset by utilizing only the LiDAR point cloud data.
Introduction
We implement Part-A^2 and provide its results and checkpoints on KITTI dataset.
Results and models
KITTI
| Backbone | Class | Lr schd | Mem (GB) | Inf time (fps) | mAP | Download |
|---|---|---|---|---|---|---|
| SECFPN | 3 Class | cyclic 80e | 4.1 | 68.33 | model | log | |
| SECFPN | Car | cyclic 80e | 4.0 | 79.08 | model | log |
Citation
@article{shi2020points,
title={From points to parts: 3d object detection from point cloud with part-aware and part-aggregation network},
author={Shi, Shaoshuai and Wang, Zhe and Shi, Jianping and Wang, Xiaogang and Li, Hongsheng},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
year={2020},
publisher={IEEE}
}