Spaces:
Sleeping

A newer version of the Gradio SDK is available:
5.16.1
title: 'GenRL: Multimodal foundation world models for generalist embodied agents'
python_version: 3.1
sdk: gradio
sdk_version: 4.36.1
app_file: app.py
pinned: false
license: mit
colorFrom: green
colorTo: green
GenRL: Multimodal foundation world models for generalist embodied agents
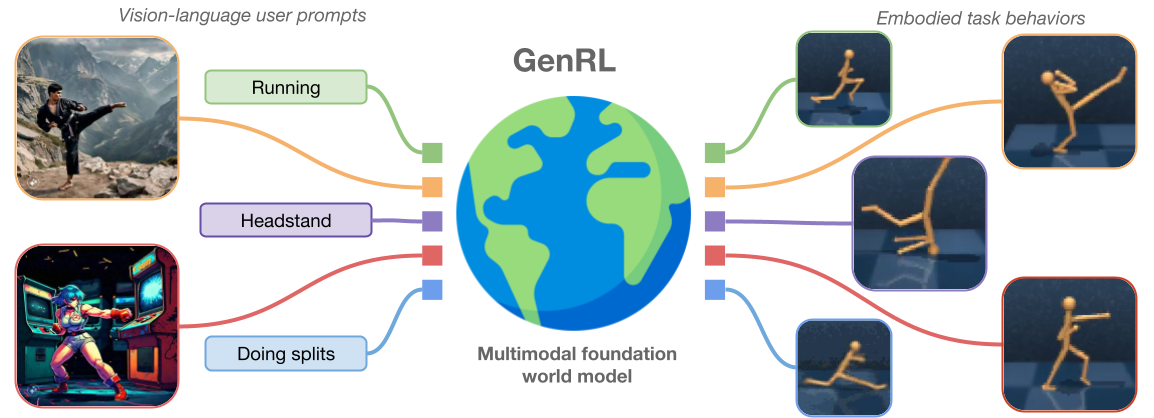
Website | Models 🤗 | Datasets 🤗 | Gradio demo | Notebooks
Get started
Creating the environment
We recommend using conda to create the environment
conda create --name genrl python=3.10
conda activate genrl
pip install -r requirements.txt
Downloading InternVideo2
Download InternVideo 2 [here].
Place in the models folder.
Note: the file access is restricted, so you'll need an HuggingFace account to request access to the file.
Note: By default, the code expects the model to be placed in the models folder. The variable MODELS_ROOT_PATH indicating where the model should be place is set in tools/genrl_utils.py.
Data
Download datasets
The datasets used to pre-trained the models can be downloaded [here].
The file are tar.gz and can be extracted using the tar utility on Linux. For example:
tar -zxvf walker_data.tar.gz
Collecting and pre-processing data
If you don't want to download our datasets, you collect and pre-process the data on your own.
Data can be collected running a DreamerV3 agent on a task, by running:
python3 collect_data.py agent=dreamer task=stickman_walk
or the Plan2Explore agent, by running:
python3 collect_data.py agent=plan2explore conf/defaults=dreamer_v2 task=stickman_walk
A repo for the experiment will be created under the directory exp_local, such as: exp_local/YYYY.MM.DD/HHMMSS_agentname. The data can then be found in the buffer subdirectory.
After obtaining the data, it should be processed to obtain the video embeddings for each frame sequence in the episodes. The processing can be done by running:
python3 process_dataset.py dataset_dir=data/stickman_example
where data/stickman_example is replaced by the folder of the data you want to process.
Agents
Downloading pre-trained models
If you want to test our work, without having to pre-train the models, you can do this by using our pre-trained models.
Pretrained models can be found [here]
Here's a snippet to download them easily:
import os
from huggingface_hub import hf_hub_download
def download_model(model_folder, model_filename):
REPO_ID = 'mazpie/genrl_models'
filename_list = [model_filename]
if not os.path.exists(model_folder):
os.makedirs(model_folder)
for filename in filename_list:
local_file = os.path.join(model_folder, filename)
if not os.path.exists(local_file):
hf_hub_download(repo_id=REPO_ID, filename=filename, local_dir=model_folder, local_dir_use_symlinks=False)
download_model('models', 'genrl_stickman_500k_2.pt')
Pre-trained models can be used by setting snapshot_load_dir=... when running train.py.
Note: the pre-trained models are not trained to solve any tasks. They only contain a pre-trained multimodal foundation world model (world model + connector and aligner).
Training multimodal foundation world models
In order to train a multimodal foundation world model from data, you should run something like:
# Note: frames = update steps
python3 train.py task=stickman_walk replay_load_dir=data/stickman_example num_train_frames=500_010 visual_every_frames=25_000 train_world_model=True train_connector=True reset_world_model=True reset_connector=True
Behavior learning
After pre-training a model, you can train the behavior for a task using:
python3 train.py task=stickman_walk snapshot_load_dir=models/genrl_stickman_500k_2.pt num_train_frames=50_010 batch_size=32 batch_length=32 agent.imag_reward_fn=video_text_reward eval_modality=task_imag
Data-free RL can be performed by additionaly passing the option:
train_from_data=False
The prompts for each task can be found and edited in tools/genrl_utils.py. However, you can also pass a custom prompt for a task by passing the option:
+agent.imag_reward_args.task_prompt=custom_prompt
Other utilities
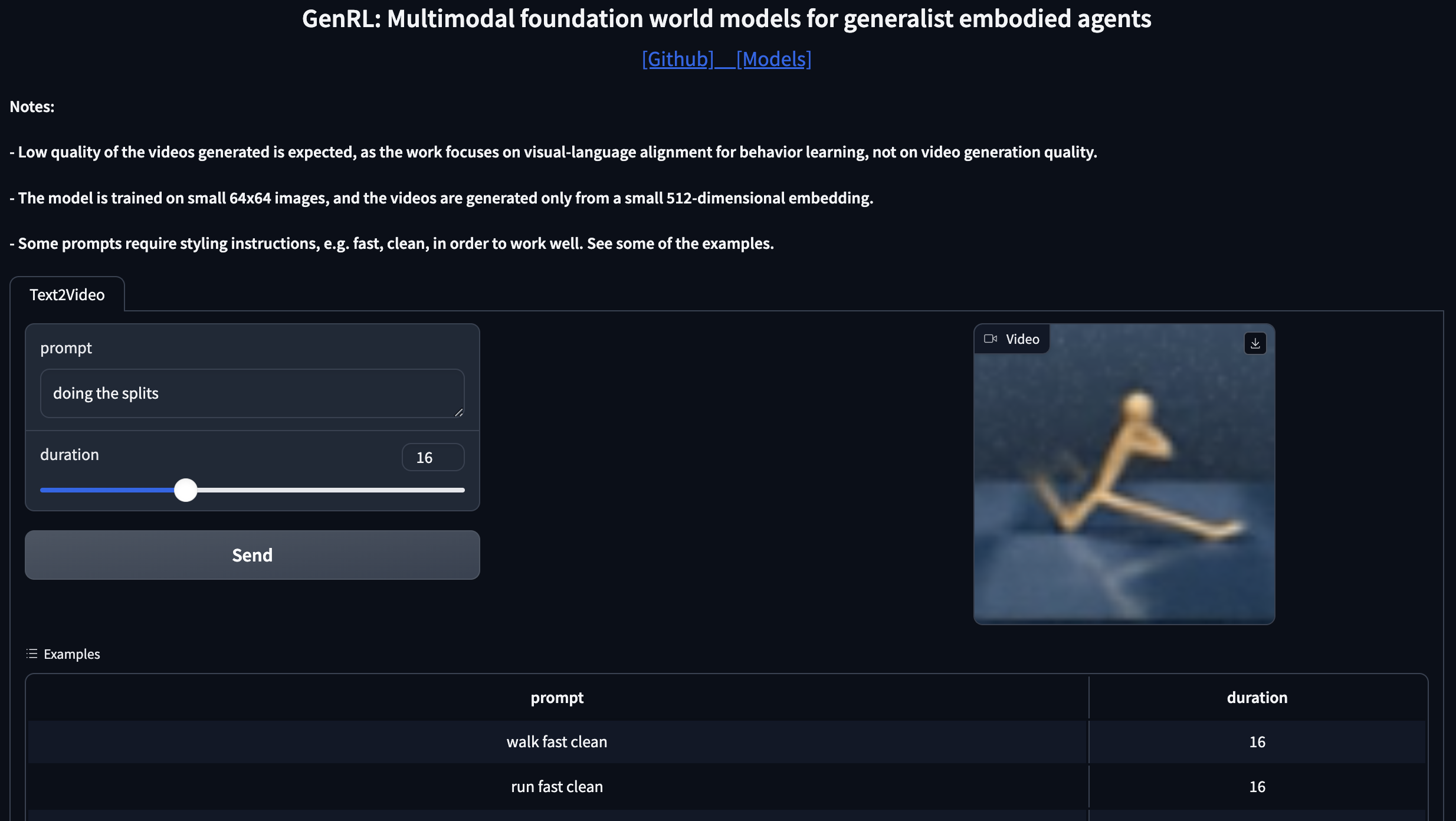
Gradio demo
There's a gradio demo that can be found at demo/app.py.
If launching demo like a standard Python program with:
python3 demo/app.py
it will return a local endpoint (e.g. http://127.0.0.1:7860) where to access a dashboard to play with GenRL.
Notebooks
You can find several notebooks to test our code in the notebooks directory.
demo_videoclip : can be used to test the correct functioning of the InternVideo2 component
text2video : utility to generate video reconstructions from text prompts
video2video : utility to generate video reconstructions from video prompts
visualize_dataset_episodes : utility to generate videos from the episodes in a given dataset
visualize_env : used to play with the environment and, for instance, understand how the reward function of each task works
Stickman environment
We introduced the Stickman environment as a simplified 2D version of the Humanoid environment.
This can be found in the envs/custom_dmc_tasks folder. You will find an .xml model and a .py files containing the tasks.
Acknowledgments
We would like to thank the authors of the following repositories for their useful code and models: